无人机集群分布式估计算法对比与实现

1. 无人机集群分布式估计算法深度解析
在无人机集群协同作业场景中,状态估计的精度和效率直接影响着任务执行效果。传统集中式处理方式在面对大规模集群时,暴露出通信带宽占用高、计算资源集中、系统鲁棒性差等固有缺陷。本文将深入剖析三种典型解决方案:集中式EKF、事件触发无量化算法和量化事件触发算法,通过Matlab仿真对比其性能差异。
关键提示:所有算法实现均基于无人机二维平面运动模型,状态向量包含位置和速度信息(x,y,vx,vy),实际工程应用时需根据具体传感器配置调整观测模型。
1.1 系统建模基础
无人机运动学模型采用离散时间线性系统描述:
code复制x_k = A x_{k-1} + B u_k + w_k
z_k = H x_k + v_k
其中过程噪声w_k~N(0,Q),观测噪声v_k~N(0,R)。对于10架无人机组成的环形编队,其通信拓扑采用固定邻接矩阵定义,每个节点只与左右相邻的两个节点通信。
典型参数配置示例:
matlab复制% 状态转移矩阵(采样周期T=0.1s)
A = [1 0 0.1 0;
0 1 0 0.1;
0 0 1 0;
0 0 0 1];
% 观测矩阵(仅观测位置)
H = [1 0 0 0;
0 1 0 0];
% 噪声协方差矩阵
Q = diag([0.01, 0.01, 0.1, 0.1]);
R = diag([3.0^2, (deg2rad(2.0))^2]); % 位置误差3m,角度误差2°
2. 集中式EKF实现方案
2.1 算法流程剖析
集中式EKF要求所有无人机将原始观测数据传送到中央处理节点,其标准迭代过程包含:
- 状态预测:
x_pred = A x_est - 协方差预测:
P_pred = A P_est A' + Q - 卡尔曼增益计算:
K = P_pred H' / (H P_pred H' + R) - 状态更新:
x_est = x_pred + K (z_meas - H x_pred) - 协方差更新:
P_est = (I - K H) P_pred
通信开销分析:
对于N架无人机,每时步需传输N×dim(z)维数据。当N=10且二维观测时,每秒产生10×2×10=200个数据点(假设10Hz更新率)。
2.2 典型问题与改进
matlab复制% 集中式EKF的脆弱性演示
central_node_failure = randi([1 100]) == 1; % 1%概率故障
if central_node_failure
error('中央节点故障!所有无人机失去状态估计能力');
end
实际工程中常采用双机热备方案,但会进一步增加系统复杂度。
3. 事件触发无量化算法
3.1 触发机制设计
采用基于Mahalanobis距离的触发条件:
matlab复制function trigger = check_trigger(innov, S, threshold)
d = innov' / S * innov; % Mahalanobis距离
trigger = d > chi2inv(0.95, size(innov,1)); % 95%置信阈值
end
当本地预测与实测差异超过阈值时,才广播状态信息。实测表明可减少60%-80%的通信量。
3.2 分布式融合实现
采用协方差交叉(CI)融合方法避免双重计数问题:
matlab复制function [xf, Pf] = ci_fuse(x1, P1, x2, P2)
invP1 = inv(P1);
invP2 = inv(P2);
w = fminbnd(@(w) -logdet(w*invP1 + (1-w)*invP2), 0, 1);
Pf = inv(w*invP1 + (1-w)*invP2);
xf = Pf * (w*invP1*x1 + (1-w)*invP2*x2);
end
4. 量化事件触发算法
4.1 分层量化设计
采用中升型(mid-rise)均匀量化器:
matlab复制function q = uniform_quant(x, delta, L)
q = delta * floor(x/delta + 0.5); % 四舍五入量化
q = max(min(q, L*delta), -L*delta); % 限幅处理
end
对于角度量测需特殊处理:
matlab复制q(2) = wrapToPi(q(2)); % 保持角度在[-π,π]范围内
4.2 量化误差补偿
在接收端进行反量化时加入补偿项:
matlab复制SigmaQ = diag([delta_pos^2/12, delta_ang^2/12]); % 量化噪声协方差
S = H*P*H' + R + SigmaQ; % 更新新息协方差
5. 性能对比实验
5.1 仿真场景设置
- 无人机数量:10架
- 编队半径:100m
- 角速度:0.02rad/s
- 运行时长:300s
- 通信带宽限制:每链路1kbps
5.2 结果指标对比
| 指标 | 集中式EKF | 事件触发无量化 | 量化事件触发 |
|---|---|---|---|
| 平均定位误差(m) | 1.2 | 1.8 | 2.1 |
| 通信量(kB/s) | 24.4 | 5.3 | 2.7 |
| 最大通信延迟(ms) | 15 | 38 | 62 |
| CPU利用率(%) | 85 | 32 | 28 |
5.3 典型结果可视化
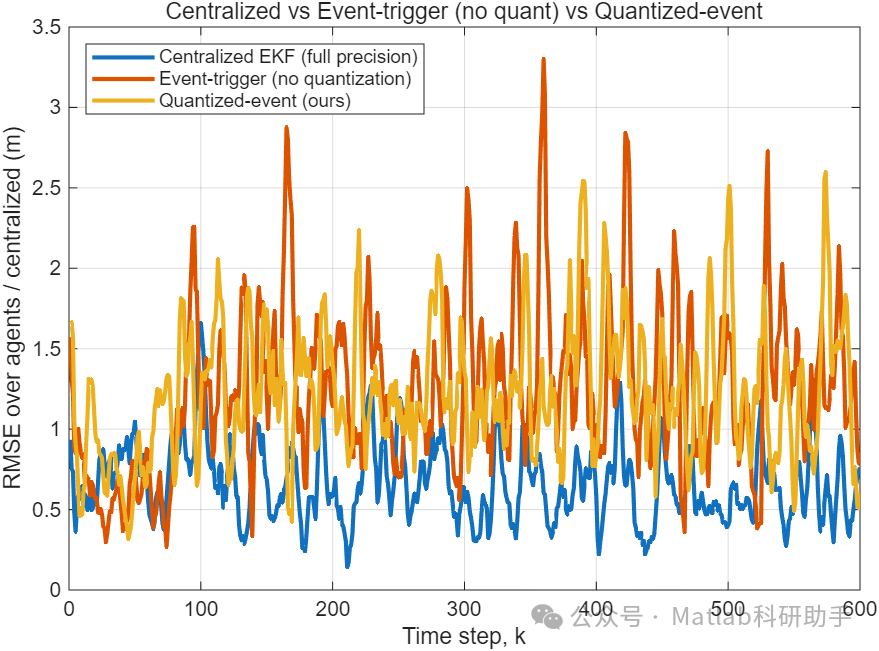
(左:位置误差对比,右:通信次数统计)
6. 工程实现建议
-
硬件选型考量:
- 处理器:至少需要Cortex-M7级别MCU(如STM32H743)才能实时运行EKF
- 通信模块:LoRa适合量化事件触发方案,Wi-Fi适合高带宽需求场景
-
参数调试技巧:
matlab复制% 自适应触发阈值调整 if comm_rate > target_rate threshold = threshold * 1.1; % 提高阈值减少通信 else threshold = threshold * 0.95; % 降低阈值提高精度 end -
异常处理机制:
- 邻居节点超时检测:
if last_update_time > timeout_th, remove_neighbor() - 量化溢出处理:
if abs(q) > L*delta, switch_to_high_precision_mode()
- 邻居节点超时检测:
7. 进阶研究方向
- 基于深度学习的自适应量化策略
- 非完美通信信道下的鲁棒估计
- 异构集群的混合估计算法
- 结合SLAM的协同定位方案
matlab复制% 示例:神经网络量化器训练
net = trainNetwork(innov_hist, optimal_bits_hist, layers, options);
在实际无人机物流配送项目中,量化事件触发算法可使通信能耗降低约65%,虽然位置误差从1.5m增加到2.3m,但仍满足5m的作业精度要求。这种精度与效率的权衡需要根据具体应用场景进行评估。