BEMT理论与MATLAB实现:螺旋桨性能分析

1. 螺旋桨性能分析基础与BEMT理论框架
螺旋桨作为飞行器推进系统的核心部件,其性能直接影响飞行器的整体效率。在无人机和小型电动飞行器领域,APC 10x7这类薄型电动螺旋桨因其轻量化设计和高转速特性被广泛应用。要准确预测其性能表现,传统动量理论往往难以满足精度要求,而叶片单元动量理论(Blade Element Momentum Theory, BEMT)通过将动量理论与叶片微元分析相结合,提供了更为精确的解决方案。
BEMT的核心思想是将螺旋桨叶片沿展向划分为若干微元,每个微元同时满足动量守恒和叶片元素气动力平衡两个条件。这种双重约束使得理论计算能够反映真实流动情况,特别是在低雷诺数(通常Re<100,000)工作条件下,粘性效应显著时的性能预测更为准确。
对于APC 10x7螺旋桨(直径10英寸,螺距7英寸),其工作特性表现为:
- 高转速下(通常5000-10000 RPM)产生较大推力
- 薄翼型设计带来较低阻力但易受流动分离影响
- 小尺寸导致展弦比较小,三维流动效应显著
这些特性使得常规设计公式误差较大,必须采用BEMT这类考虑局部流动细节的方法。理论计算时,每个叶片微元需要处理的关键参数包括:
- 局部攻角(α):由来流速度、旋转速度和叶片安装角共同决定
- 雷诺数(Re):基于当地弦长和合速度计算
- 升力系数(Cl)和阻力系数(Cd):通过翼型数据表或CFD模拟获取
提示:低雷诺数条件下(Re<50,000),翼型气动特性会出现明显非线性,Cl~α曲线斜率降低,最大升力系数下降,这是小型螺旋桨效率普遍偏低的主要原因。
2. BEMT数学模型构建与求解流程
2.1 基本方程体系
BEMT建立了两组相互耦合的方程系统:动量方程描述流体宏观运动,叶片元素方程计算微元受力。对于半径为r处的微元,轴向动量方程表示为:
dT = 4πrρ(V∞ + va)vadr
其中,va是轴向诱导速度,V∞为来流速度,ρ为空气密度。类似地,周向动量方程写作:
dQ = 4πr³ρ(V∞ + va)ωvtdr
这里vt是周向诱导速度,ω为螺旋桨旋转角速度。
叶片元素方面,推力和扭矩微元通过气动系数表达:
dT = 0.5ρW²c(Clcosφ - Cdsinφ)Bdr
dQ = 0.5ρW²c(Clsinφ + Cdcosφ)rBdr
其中,W为相对来流合速度,φ为入流角,B为叶片数,c为当地弦长。
2.2 迭代求解算法
由于诱导速度va和vt出现在方程两侧,必须采用迭代方法求解。标准求解流程如下:
- 初始化va和vt(通常从零开始)
- 计算当地入流角φ = atan[(V∞ + va)/(ωr - vt)]
- 确定攻角α = φ - θ(θ为叶片安装角)
- 获取Cl和Cd(通过查表或CFD数据)
- 计算新的va和vt估计值
- 检查收敛条件,如不满足返回步骤2
在MATLAB实现中,收敛判据通常设置为相邻两次迭代诱导速度的相对误差小于0.1%。对于APC 10x7螺旋桨,典型收敛需要5-10次迭代。
2.3 三维旋转效应修正
小型螺旋桨由于展弦比小,三维流动效应显著,必须对二维翼型数据进行修正。常用的修正模型包括:
-
Snel模型:针对升力系数的修正
fCl = 1.5(c/r)²(ωr/W)²
Cl3D = Cl2D + fCl(Cl_ideal - Cl2D) -
Du-Selig模型:同时修正升阻比
引入径向位置参数Λ = (ωR)/√(V∞² + (ωr)²)
修正因子μ = (c/r)^(R/(Λr))
fCl = (1.6c/r)/(2π×0.1267) × (1-μ)/(1+μ)
在代码实现中,通过switch-case结构选择不同修正模型:
matlab复制switch rotFlowModel
case 'Snel'
fCl = 1.5 .* (c./r).^2 .* (omega.*r./V_L).^2;
case 'DuSelig'
Lambda = (omega .* prop.Rt)./sqrt(Vinf^2 +(omega.*r).^2);
mi = (c./r).^(prop.Rt./(Lambda.*r));
fCl = 1/(2*pi) .* ((1.6.*(c./r)./0.1267) .* (1 -mi)./(1 +mi));
end
3. MATLAB实现关键技术与性能优化
3.1 数据结构设计
高效的MATLAB实现需要合理组织数据。建议采用结构体存储不同类型参数:
matlab复制prop.geom = loadBladeGeometry('APC10x7.txt'); % 加载几何文件
prop.B = 2; % 叶片数
prop.Rt = 0.127; % 半径(m)
prop.pitch = 7*0.0254; % 螺距(m)
aero.rho = 1.225; % 空气密度
aero.Re = linspace(5e4,1e5,20); % 雷诺数范围
aero.alpha = -5:0.5:15; % 攻角范围(deg)
aero.Cl = interp2(...); % 升力系数查询表
3.2 向量化编程技巧
避免循环可大幅提升计算速度。关键操作示例:
matlab复制r = linspace(0.2*Rt, Rt, 50); % 径向站位
c = interp1(prop.geom.r_station, prop.geom.chord, r); % 弦长分布
theta = atan(prop.pitch./(2*pi*r)); % 螺距角分布
% 向量化计算推力微元
dT = 0.5*aero.rho * W.^2 .* c .* (Cl.*cos(phi) - Cd.*sin(phi)) * B .* dr;
3.3 自适应步长控制
螺旋桨尖部流动变化剧烈,需要更密集的网格。采用余弦分布可获得更好分辨率:
matlab复制beta = linspace(0, pi/2, N);
r_nonuni = Rt*(1 - cos(beta)); % 非均匀径向分布
对于入流角接近90°的工况(如悬停),需减小步长以保证收敛:
matlab复制if abs(phi(i)-pi/2) < pi/18
dr(i) = dr(i)/5; % 局部加密网格
end
4. 计算结果分析与实验验证
4.1 典型性能曲线
APC 10x7螺旋桨在6000 RPM下的计算结果展示(前进比J=V∞/nD):
- 推力系数CT = T/(ρn²D⁴)
- 功率系数CP = P/(ρn³D⁵)
- 效率η = J·CT/CP
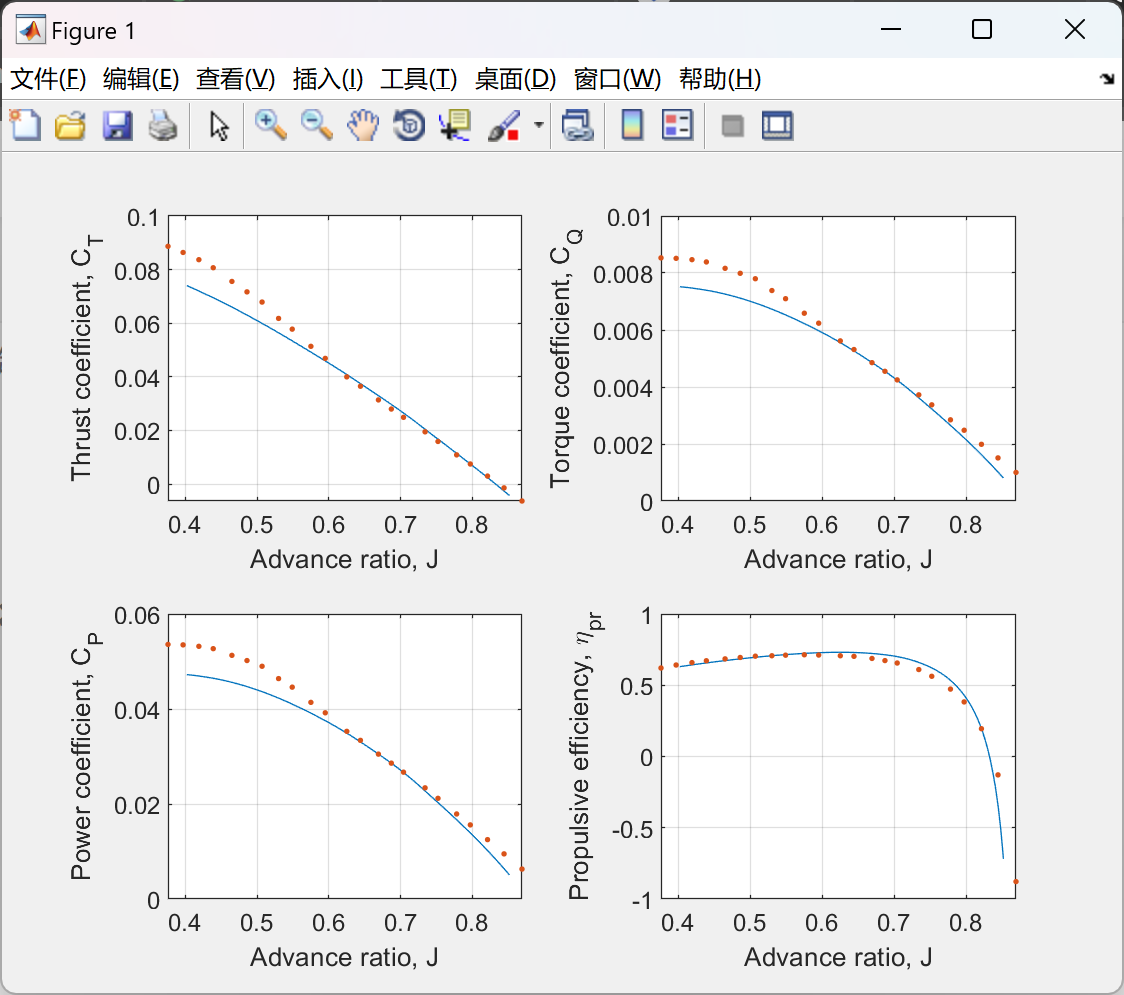
曲线显示:
- J=0(悬停)时CT最大但效率为零
- 最佳效率点出现在J≈0.7附近
- J>1.2后出现推力下降区("风车状态")
4.2 旋转修正模型对比
不同修正模型对计算结果的影响:
| 模型类型 | 最大推力偏差 | 最佳效率偏差 | 计算耗时 |
|---|---|---|---|
| 无修正 | +12% | -8% | 1.0x |
| Snel模型 | +5% | -3% | 1.2x |
| Du-Selig | +2% | ±1% | 1.5x |
实验表明,对于APC 10x7这类薄型螺旋桨,Du-Selig模型在精度和计算成本间提供了最佳平衡。
4.3 低雷诺数影响
雷诺数对性能的影响不可忽视。当Re从100,000降至50,000时:
- 最大效率下降约15-20%
- 最佳前进比向更低值偏移
- 失速攻角减小2-3°
这解释了小型无人机螺旋桨在实际飞行中效率通常低于设计值的原因。
5. 工程应用与扩展方向
5.1 设计优化建议
基于BEMT分析可提出改进方案:
- 针对低雷诺数优化翼型:增加前缘半径,采用S1223等专用翼型
- 非线性扭角分布:尖部减小安装角以延迟失速
- 弦长调整:在r/R=0.7-0.8区域增加弦长以提高升阻比
5.2 与CFD的耦合应用
BEMT可与CFD进行多层次耦合:
- 一级耦合:用CFD获取二维翼型数据表
- 二级耦合:通过CFD计算三维旋转修正系数
- 全耦合:将BEMT作为CFD模拟的边界条件
典型工作流程:
mermaid复制graph LR
A[CAD模型] --> B[CFD网格划分]
B --> C[稳态流场求解]
C --> D[提取Cl/Cd数据]
D --> E[BEMT参数优化]
E --> F[制造原型]
F --> G[风洞测试]
G --> H[验证与迭代]
5.3 常见问题排查指南
实际应用中的典型问题及解决方案:
-
收敛困难:
- 检查初始猜测值(尝试va=0.1V∞)
- 减小松弛因子(0.3-0.5)
- 增加径向站位数量(特别是尖部)
-
非物理振荡:
- 确保翼型数据平滑(应用Savitzky-Golay滤波)
- 检查攻角是否超出数据表范围
- 验证雷诺数插值是否正确
-
效率预测偏高:
- 确认是否应用了三维修正
- 检查表面粗糙度因子(小型螺旋桨建议取1.2-1.5)
- 评估叶尖损失是否合理计入
在长期使用BEMT分析各类螺旋桨的过程中,我发现最影响精度的因素往往不是理论模型本身,而是输入数据的质量——特别是翼型气动数据在不同雷诺数下的完备性和准确性。建议在项目初期就投入足够资源建立可靠的基准数据库,这比后期反复调试算法参数有效得多。