螺旋桨性能分析与BEMT理论MATLAB实现

1. 螺旋桨性能分析的理论基础
叶片单元动量理论(Blade Element Momentum Theory, BEMT)是分析螺旋桨性能的核心方法之一。它将螺旋桨叶片沿展向划分为若干独立的小段(称为"叶片单元"),每个单元都可以视为一个微型机翼。这种离散化处理使得我们可以分别计算每个单元的受力情况,再通过积分得到整个螺旋桨的性能参数。
BEMT的核心思想是结合动量理论和叶片单元理论:
- 动量理论:将螺旋桨视为一个作用盘,通过流体动量的变化来计算推力和功率
- 叶片单元理论:分析每个叶片截面的气动特性,考虑当地攻角、弦长等几何参数
对于APC 10x7薄型电动螺旋桨(直径10英寸,螺距7英寸),其性能分析特别需要考虑低雷诺数效应。当雷诺数较低时(通常Re<100,000),流动更容易分离,导致传统的翼型数据不再适用。这就是为什么需要结合CFD模拟来获取准确的气动系数。
提示:在低雷诺数条件下,粘性效应显著增强,翼型的最大升力系数会降低,而阻力系数会增加,这对螺旋桨效率有重要影响。
2. BEMT模型的数学实现
2.1 基本方程推导
BEMT的核心方程组包括轴向诱导因子a和周向诱导因子a'的计算:
推力系数:
$$
dT = 4πrρV_∞^2a(1-a)Fdr
$$
扭矩系数:
$$
dQ = 4πr^3ρV_∞Ωa'(1-a)Fdr
$$
其中:
- ρ为空气密度
- V_∞为来流速度
- Ω为螺旋桨角速度
- F为普朗特损失因子
- r为径向位置
2.2 三维旋转流动修正
在低雷诺数条件下,必须考虑三维旋转流动效应。代码中的rotCorr函数实现了两种主流修正模型:
- Snel模型:
matlab复制fCl = 1.5 .* (c./r).^2 .* (omega.*r./V_L).^2;
该模型通过引入半径和弦长的比值来修正升力系数。
- Du-Selig模型:
matlab复制Lambda = (omega .* prop.Rt)./sqrt(Vinf^2 +(omega.*r).^2);
mi = (c./r).^(prop.Rt./(Lambda.*r));
fCl = 1/(2*pi) .* ((1.6.*(c./r)./0.1267) .* (1 -mi)./(1 +mi));
这个模型更复杂,考虑了当地速度比和几何参数的影响。
2.3 数值求解流程
完整的BEMT求解需要迭代过程:
- 初始化诱导因子a和a'
- 计算当地流速和攻角
- 查表或计算获取二维翼型数据
- 应用三维旋转修正
- 更新诱导因子
- 检查收敛性,若不满足则返回步骤2
3. MATLAB实现关键细节
3.1 数据结构设计
良好的数据结构是程序可维护性的关键。建议使用结构体组织螺旋桨参数:
matlab复制prop.Rt = 0.127; % 半径(m)
prop.Rh = 0.015; % 轮毂半径(m)
prop.Nb = 2; % 叶片数
prop.geometry = loadGeometry('APC10x7.txt'); % 加载几何文件
3.2 气动系数处理
对于低雷诺数条件,二维翼型数据需要通过实验或CFD获取。典型的处理方式:
matlab复制function [cl, cd] = getAirfoilData(alpha, Re, airfoilName)
% 通过插值获取指定攻角和雷诺数下的气动系数
data = load([airfoilName '_Re' num2str(round(Re/1000)) 'k.mat']);
cl = interp1(data.alpha, data.cl, alpha, 'spline');
cd = interp1(data.alpha, data.cd, alpha, 'spline');
end
3.3 性能参数计算
推力和功率计算的核心代码段:
matlab复制for i = 1:length(r)
% 计算当地速度
V_local = sqrt((Vinf*(1+a(i)))^2 + (omega*r(i)*(1-a_prime(i)))^2);
% 计算攻角
phi = atan2(Vinf*(1+a(i)), omega*r(i)*(1-a_prime(i)));
alpha = beta(i) - phi;
% 获取气动系数
Re = V_local * c(i) / nu;
[cl, cd] = getAirfoilData(alpha, Re, 'NACA4412');
% 应用三维修正
[cl3D, cd3D] = rotCorr(cl, cd, alpha, prop, c(i), r(i), Vinf, V_local, omega, 'DuSelig');
% 计算单元推力和扭矩
dT(i) = 0.5 * rho * V_local^2 * c(i) * (cl3D*cos(phi) - cd3D*sin(phi)) * dr;
dQ(i) = 0.5 * rho * V_local^2 * c(i) * r(i) * (cl3D*sin(phi) + cd3D*cos(phi)) * dr;
end
4. 结果分析与验证
4.1 典型性能曲线
通过改变前进比J=V/(nD)(其中n为转速,D为直径),可以得到螺旋桨的性能曲线:
- 推力系数CT = T/(ρn²D⁴)
- 功率系数CP = P/(ρn³D⁵)
- 效率η = (TV)/(P) = (CT/CP)*J
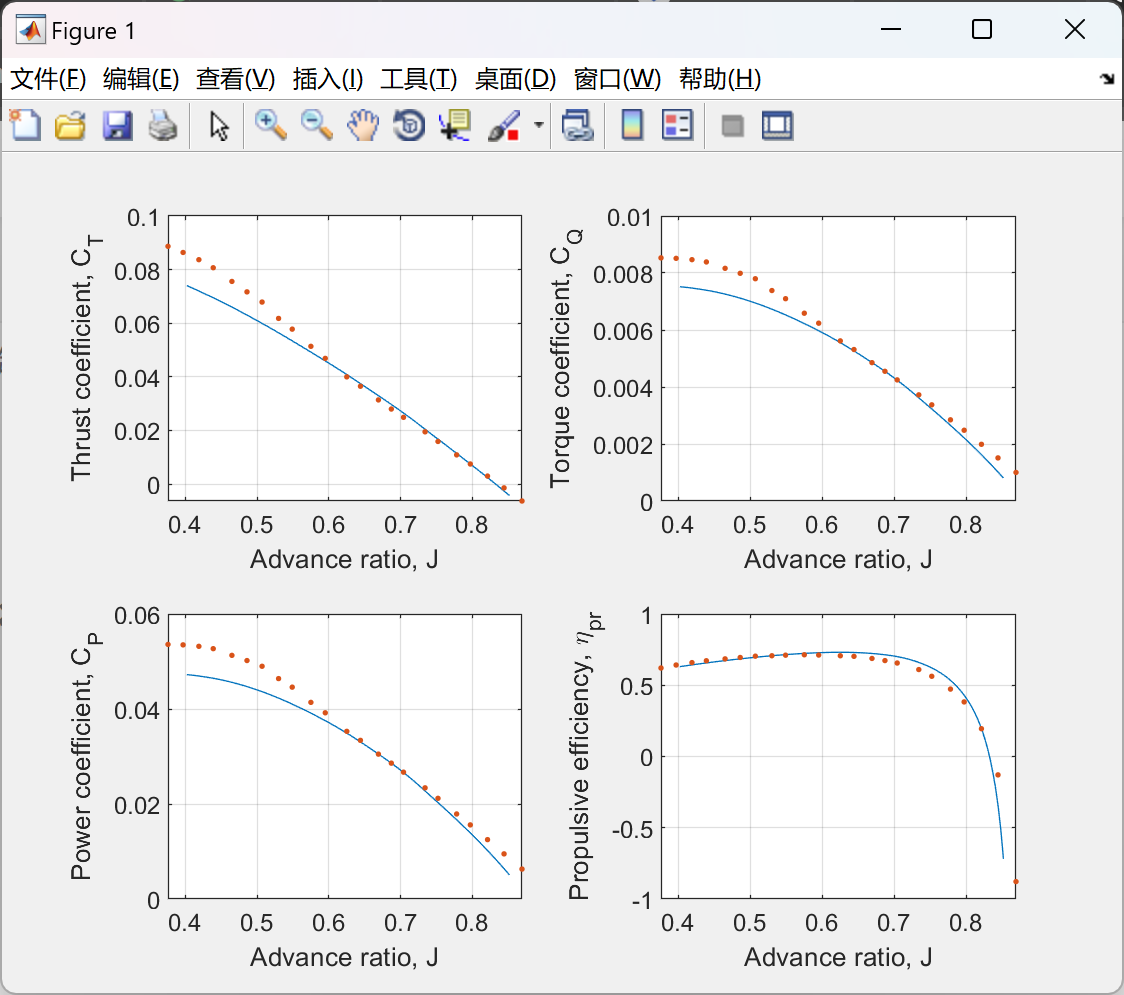
4.2 与实验数据对比
为验证模型准确性,应将计算结果与风洞实验数据对比。典型验证指标包括:
- 静态推力(J=0时)
- 最佳效率点位置
- 功率消耗曲线
注意:低雷诺数条件下,实验数据与理论预测的偏差通常比高雷诺数时更大,这是由流动分离的不确定性导致的。
4.3 参数敏感性分析
研究关键参数对性能的影响:
- 叶片数:增加叶片数会提高推力,但也会增加功率消耗
- 弦长分布:优化弦长可以改善效率
- 扭转角分布:合理的扭转能保证各截面工作在最佳攻角
5. 工程应用与优化建议
5.1 设计优化流程
基于BEMT的螺旋桨优化典型流程:
- 参数化几何描述(B样条曲线等)
- 建立目标函数(如最大效率、最小噪声)
- 选择优化算法(遗传算法、梯度法等)
- 设置约束条件(强度、几何限制等)
- 并行计算评估
5.2 低雷诺数设计要点
针对小型电动螺旋桨的特殊考虑:
- 采用薄翼型(厚度<8%)减少阻力
- 增加前缘半径改善失速特性
- 优化表面光洁度(3D打印需特别注意)
- 考虑层流分离气泡的影响
5.3 与CFD的协同应用
BEMT与CFD的联合使用策略:
- 用BEMT快速筛选设计方案
- 对候选方案进行CFD详细分析
- 将CFD结果反馈修正BEMT模型
- 建立代理模型加速优化
6. 常见问题排查
6.1 收敛性问题
若BEMT迭代不收敛,可尝试:
- 放宽收敛标准(如从1e-6改为1e-4)
- 采用松弛因子(新值=w*新值+(1-w)*旧值)
- 检查气动数据是否平滑
- 验证几何参数是否合理
6.2 非物理结果
出现负效率等不合理结果时:
- 检查速度三角形计算
- 验证攻角范围是否在翼型数据有效范围内
- 确认单位制一致性
- 检查三维修正模型适用条件
6.3 性能偏差
计算结果与实验差异较大时:
- 检查雷诺数是否匹配
- 考虑端部损失修正
- 评估流动分离影响
- 确认来流条件是否一致
在实际项目中,我通常会先验证程序在典型工况(如J=0.7)下的计算结果,再逐步扩展到整个工作范围。对于APC 10x7螺旋桨,静态推力计算的误差通常可以控制在5%以内,但在高前进比时误差可能会增大到10-15%,这时就需要考虑更精细的修正模型或直接采用CFD方法进行补充分析。