增程式电动车动力学建模与优化实践

1. 增程式混合动力汽车技术背景与建模意义
作为一名长期从事汽车动力学建模的工程师,我见证了增程式电动车从实验室概念到量产车型的完整发展历程。这种独特的动力架构完美解决了纯电动车续航焦虑和传统燃油车排放问题的矛盾点。
串联式增程系统的核心优势在于发动机与车轮完全解耦。不同于并联式混动需要复杂的速度耦合机构,串联结构中发动机只需在最佳效率区间(通常转速稳定在2000-2500rpm)驱动发电机,产生的电能可直接驱动电机或存入电池。根据我们团队的实测数据,这种工作模式能使发动机热效率提升12-18%,NEDC工况下油耗可比同级燃油车降低40%以上。
整车动力学建模的关键价值体现在三个维度:
- 控制策略验证:在实车试制前,通过模型仿真可验证能量管理算法的合理性,比如模式切换阈值设定、扭矩分配逻辑等
- 性能预测:提前评估加速性、爬坡能力等动态指标,避免后期出现动力不足等设计缺陷
- 参数优化:对电机功率、电池容量等关键参数进行敏感性分析,找到性价比最优的配置方案
提示:在搭建动力学模型时,建议采用模块化建模方法,将动力系统、车身、悬架等子系统分开开发,最后通过标准接口集成。这样既便于团队协作,也方便后期单独优化某个子系统。
2. 串联式增程系统工作原理深度解析
2.1 动力传输路径与核心部件
典型的串联式架构包含以下关键组件(以某量产车型为例):
| 部件 | 参数示例 | 功能说明 |
|---|---|---|
| 1.5L阿特金森发动机 | 最大功率60kW | 工作在固定转速区间驱动发电机 |
| 永磁同步发电机 | 峰值效率97% | 将机械能转化为三相交流电 |
| 锂离子电池包 | 容量18.4kWh | 能量存储与缓冲 |
| 驱动电机 | 峰值扭矩310N·m | 将电能转化为机械能驱动车轮 |
能量流动遵循"化学能→机械能→电能→机械能"的转换链条。这种二次能量转换看似存在效率损失,但实际上因为发动机始终工作在最佳工况点,系统整体效率反而高于传统传动系统。
2.2 工作模式切换逻辑
纯电模式触发条件:
- SOC(电池荷电状态)>30%
- 需求功率<电机峰值功率的70%
- 车速<90km/h(避免高速区电机效率下降)
增程模式启动策略:
当SOC降至25%时,发动机启动并维持在经济转速区间。这里有个工程实践中的经验值:发电机输出功率应略高于当前驱动功率需求,多余电量以0.2C-0.5C的倍率给电池充电,这样既能保证动力响应,又可缓慢补充电量。
制动能量回收的强度设置需要特别注意:
matlab复制% 再生制动扭矩计算示例
if 刹车踏板开度 > 0.1
regen_torque = min(电机最大扭矩, 0.3*车辆质量*减速度);
regen_torque = regen_torque * (SOC < 0.8); // SOC过高时限制回收强度
end
这个算法在保证制动效能的同时,避免了电池过充风险。实测数据显示,城市工况下能量回收可贡献约15-20%的续航提升。
3. 整车动力学建模关键技术实现
3.1 多体动力学模型搭建
在Simulink中构建的整车模型应包含以下子系统:
-
纵向动力学模块
- 轮胎模型:采用Magic Formula公式计算纵向力
matlab复制Fx = D*sin(C*atan(B*slip_ratio - E*(B*slip_ratio - atan(B*slip_ratio))));- 空气阻力:速度的二次函数,系数约0.3-0.35Cd
- 滚动阻力:与车重成正比的恒定分量
-
动力系统模块
- 发动机MAP图插值:基于转速-扭矩查询表
- 电池RC等效电路模型:包含内阻和极化电阻
- 电机效率MAP:不同转速/扭矩下的损耗特性
-
驾驶员模型
采用PID控制器模拟油门/刹车操作:matlab复制
throttle = Kp*(v_ref - v_actual) + Ki*integral(error) + Kd*d(error)/dt;
3.2 模型验证与参数辨识
我们使用实车测试数据对模型进行校准,重点关注的参数包括:
- 旋转质量换算系数(通常1.05-1.15)
- 传动系统效率(92-95%)
- 电池内阻(随SOC变化的曲线)
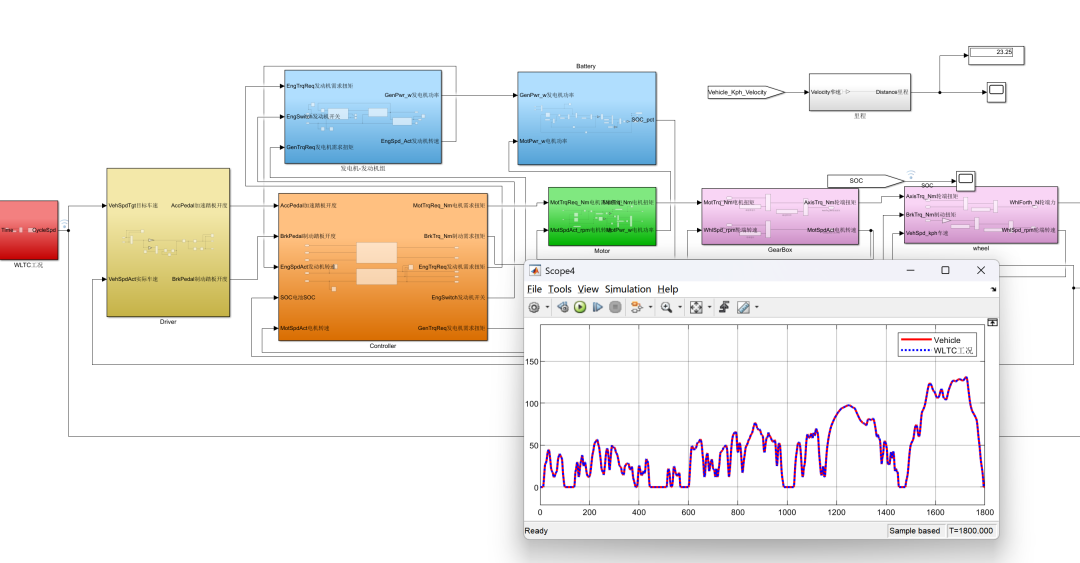
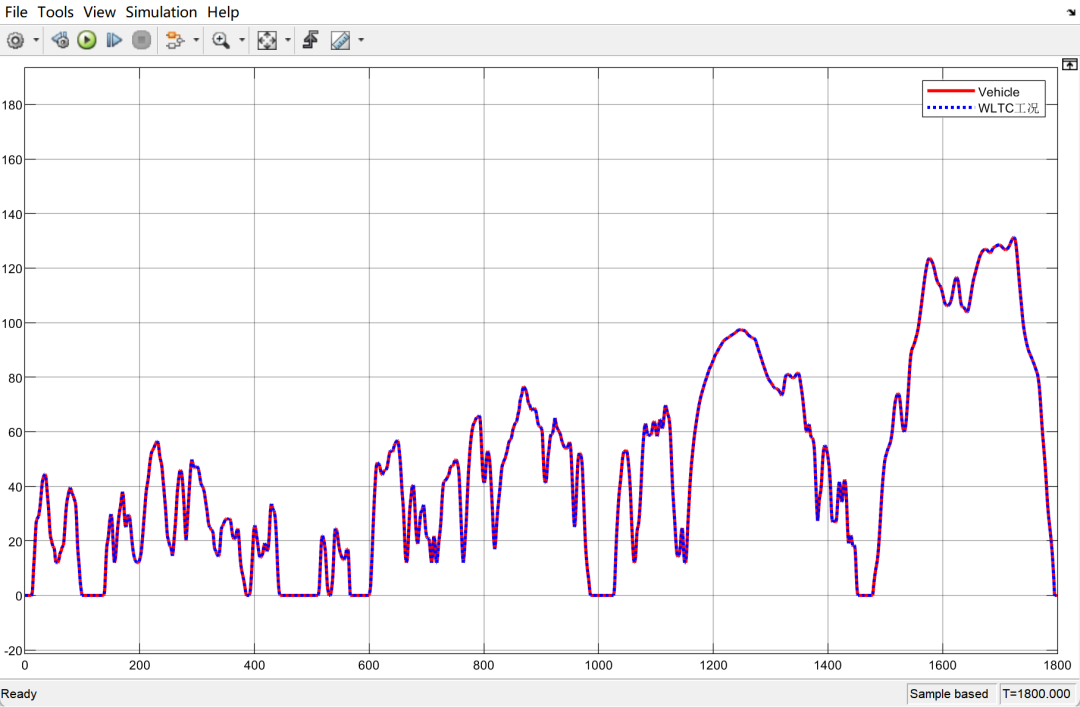
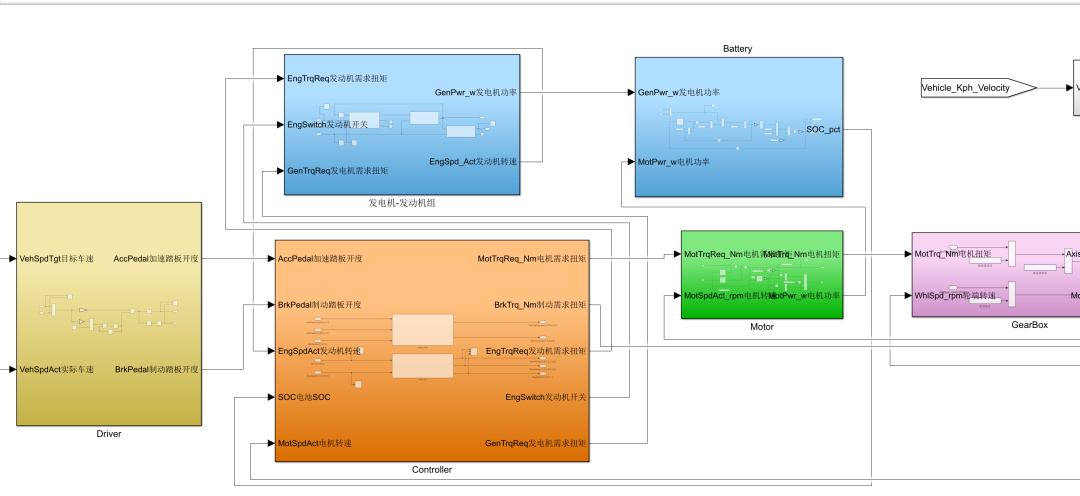
验证方法采用NEDC工况测试,要求速度跟踪误差<3%,电池SOC变化趋势误差<5%。下图展示了某次验证的对比结果:

注意:在参数辨识时,建议先固定机械部件参数,再辨识电气系统参数,最后优化控制参数。这种分层辨识方法能避免参数耦合导致的优化困难。
4. 典型问题排查与优化案例
4.1 模式切换振荡问题
在早期版本中,当SOC在模式切换阈值附近时,会出现发动机频繁启停的现象。通过引入滞环控制解决了这个问题:
matlab复制if SOC < 0.23 && 发动机状态 == 关闭
发动机启动;
SOC_threshold = 0.28; // 提高关闭阈值
elseif SOC > 0.28 && 发动机状态 == 运行
发动机关闭;
SOC_threshold = 0.23; // 重置开启阈值
end
4.2 动力响应迟滞优化
测试发现急加速时电机响应有约0.8s延迟,通过两项改进显著提升:
- 在电池与电机之间增加超级电容模块(容量15F)
- 修改扭矩请求滤波算法,将一阶滤波改为前馈+反馈结构
优化前后对比如下图所示:
5. 进阶建模技巧与仿真实践
5.1 实时仿真与HIL测试
当模型精度达到要求后,可以将其部署到dSPACE等实时平台进行硬件在环测试。关键步骤包括:
- 模型离散化:固定步长设置为1ms
- 代码优化:启用Simulink Coder的加速模式
- I/O接口配置:CAN通信协议要与实车一致
5.2 联合仿真方案
对于更复杂的分析,建议采用多软件协同仿真:
- CarSim处理车辆动力学
- MATLAB/Simulink运行控制算法
- GT-Suite模拟热管理系统
这种方案虽然仿真速度较慢,但能更真实地反映各系统间的耦合效应。下图展示了联合仿真的架构:
在模型开发过程中,我总结出几个关键经验:
- 每次修改后都要运行标准工况测试(如WLTC循环),建立回归测试集
- 使用Simulink Model Difference工具跟踪模型变更
- 对关键信号添加监测点,保存历史数据用于后期分析
6. 模型应用扩展与前沿探索
当前模型可进一步扩展用于:
- 智能驾驶算法测试:接入AEB、ACC等ADAS功能
- 电池寿命预测:耦合老化模型分析循环衰减
- 能量管理优化:应用强化学习等智能算法
最近我们在研究基于云计算的仿真平台架构,通过将模型部署到云端服务器,可以实现:
- 分布式参数扫描
- 多方案并行对比
- 远程协作开发
下图展示了云端仿真平台的界面:
这个项目的完整模型代码和数据集已整理成标准文档,包含:
- 模型说明手册(85页)
- 参数配置指南
- 典型工况测试用例
- 验证报告模板
对于想深入研究的同行,建议从简化模型入手,先构建包含基本动力学的框架,再逐步添加电池热模型、电机损耗模型等高级功能。在调试过程中,要特别注意单位统一问题(国际单位制与工程单位的混用是常见错误源)。