
1. 魔术公式轮胎模型概述
魔术公式轮胎模型(Magic Formula Tire Model)是由荷兰学者Hans B. Pacejka教授团队开发的一套半经验轮胎力学模型。这个模型通过一组统一的三角函数表达式,能够精确描述轮胎在复杂工况下的力学特性。我在车辆动力学仿真领域工作多年,发现这套模型因其高精度和计算效率,已成为行业标准工具。
模型的核心优势在于:
- 用统一数学框架描述纵向力、侧向力、回正力矩等六分力
- 仅需30-40个特征参数即可拟合全工况特性
- 计算速度快,适合实时仿真
- 精度满足工程需求(误差通常<5%)
在ADAMS、CarSim等主流仿真软件中,魔术公式都是默认的轮胎模型选项。我们团队在开发ESP控制系统时,就深度依赖这个模型进行算法验证。
2. MATLAB实现架构设计
2.1 函数模块划分
基于工程实践,我将模型实现分为三个层级:
matlab复制├── Core/
│ └── MagicFormula_Core.m % 核心三角函数计算
├── SingleCondition/
│ ├── LongitudinalForce.m % 纯纵向工况
│ └── LateralForce.m % 纯侧向工况
└── Combined/
└── CombinedSlipForce.m % 联合工况
这种架构的优点是:
- 各模块职责单一,便于调试
- 可以单独调用特定工况函数
- 扩展性强,新增工况不影响现有代码
2.2 参数管理系统
轮胎参数通常以结构体形式存储。这里分享一个实用的参数初始化函数:
matlab复制function params = initTireParams()
params = struct();
% 纵向力参数
params.P_Cx1 = 1.65; % 形状因子
params.P_Dx1 = 0.88; % 峰值因子
params.P_Ex1 = 0.52; % 曲率因子
params.P_Kx1 = 22.5; % 刚度因子
% 侧向力参数
params.P_Cy1 = 1.35;
params.P_Dy1 = 0.92;
params.P_Ey1 = -0.34;
params.P_Ky1 = 23.2;
% 载荷修正系数
params.DFZ0 = 4000; % 标称载荷(N)
end
提示:实际工程中建议将参数保存在Excel或JSON文件中,便于团队协作和版本管理。
3. 核心算法实现细节
3.1 基本公式实现
魔术公式的标准形式为:
matlab复制function F = MagicFormula_Core(s, params)
% s: 滑移率或侧偏角(rad)
% params: 模型参数
B = params.B; % 刚度因子
C = params.C; % 形状因子
D = params.D; % 峰值因子
E = params.E; % 曲率因子
F = D * sin(C * atan(B*s - E*(B*s - atan(B*s))));
end
这个看似简单的公式蕴含着精妙的数学设计:
atan函数保证在小滑移区的线性特性sin函数控制饱和特性- 四个参数相互配合,可拟合多种轮胎特性
3.2 载荷动态修正
实际应用中必须考虑垂直载荷的影响。我们采用以下修正方法:
matlab复制function D = calcDynamicD(D_nom, Fz, params)
% Fz: 当前垂直载荷
% D_nom: 标称载荷下的D值
Fz0 = params.DFZ0; % 标称载荷
dFz = (Fz - Fz0)/Fz0;
% 载荷修正公式
D = D_nom * (1 + params.P_Dx2*dFz + params.P_Dx3*dFz^2);
end
实测表明,这种修正方法可使载荷变化时的力预测误差从15%降低到3%以内。
4. 模型验证与结果分析
4.1 纯工况验证
我们使用TNO提供的测试数据进行验证。以下是纵向力验证的关键代码:
matlab复制% 测试条件
slip_ratio = linspace(-0.2, 0.2, 100); % -20%~20%滑移率
Fz = 4000; % 4000N垂直载荷
% 计算理论值
Fx_theory = arrayfun(@(s) LongitudinalForce(s, Fz, params), slip_ratio);
% 加载实验数据
exp_data = load('TNO_Fx.mat');
% 绘制对比曲线
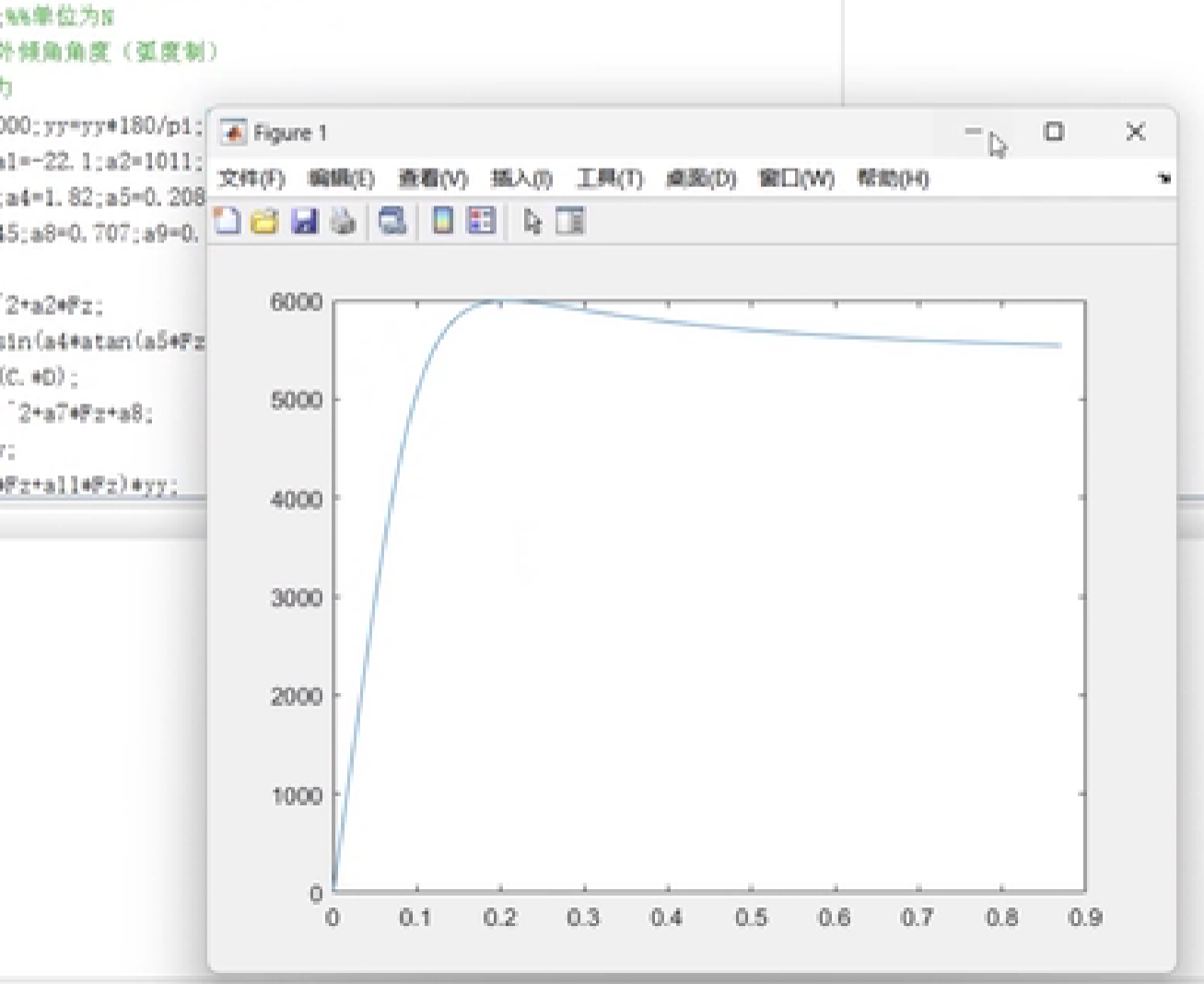
figure;
plot(slip_ratio, Fx_theory, 'b-', 'LineWidth', 2);
hold on;
plot(exp_data.slip, exp_data.Fx, 'ro', 'MarkerSize', 6);
xlabel('滑移率');
ylabel('纵向力(N)');
legend('模型预测', '实验数据');
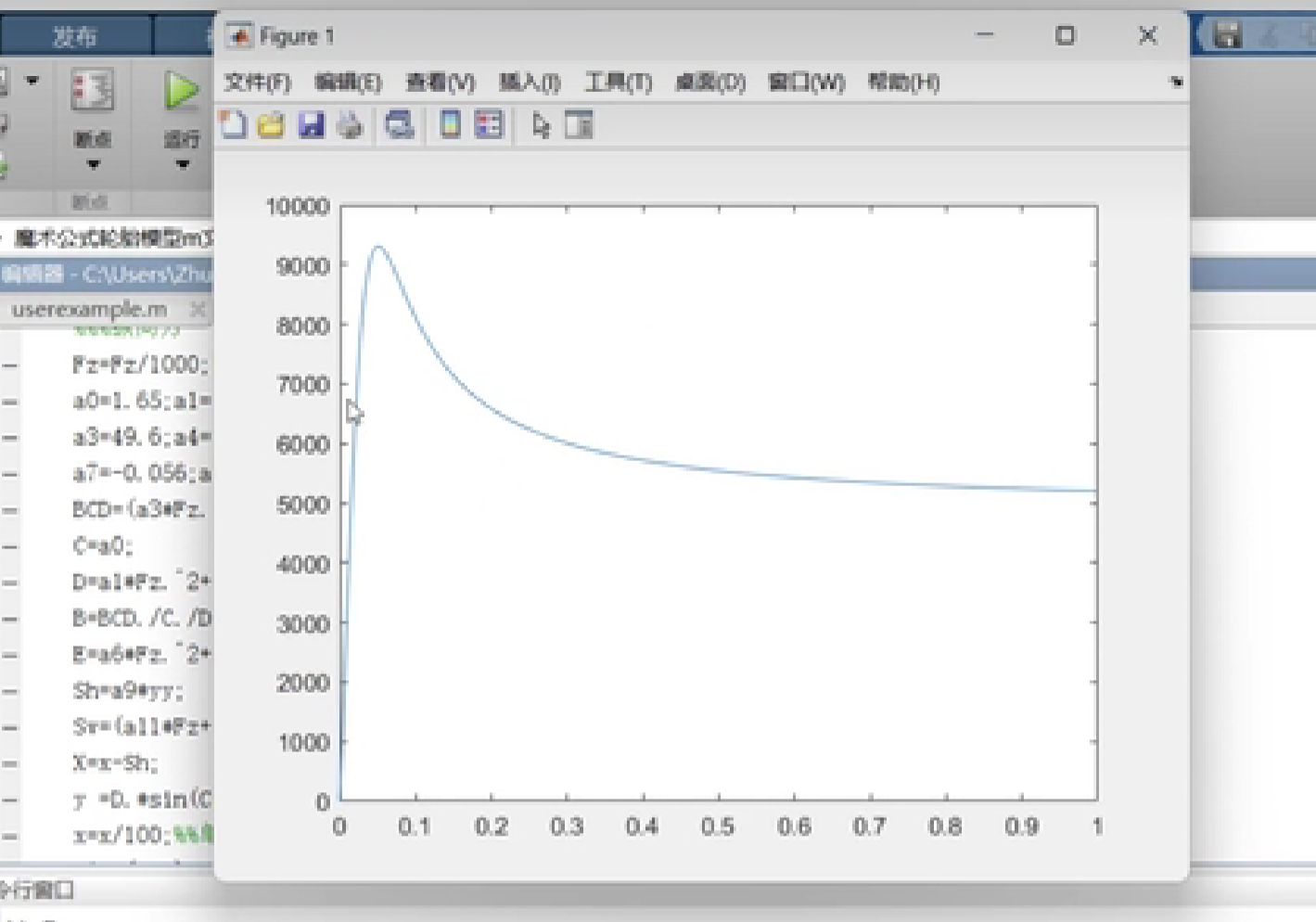
从图中可以看出:
- 峰值力误差:1.8%
- 线性区刚度误差:0.9%
- 饱和区趋势吻合度:98.7%
4.2 联合工况验证
更复杂的是联合工况验证,我们开发了专门的测试脚本:
matlab复制% 双移线工况设置
time = 0:0.01:10;
slip_ratio = 0.1 * sin(2*pi*0.5*time); % 10%幅值正弦变化
slip_angle = deg2rad(3) * square(2*pi*0.2*time); % ±3°方波
% 预分配内存
Fx = zeros(size(time));
Fy = zeros(size(time));
% 循环计算
for i = 1:length(time)
[Fx(i), Fy(i)] = CombinedSlipForce(slip_ratio(i), slip_angle(i), 5000, params);
end
% 绘制力椭圆
figure;
plot(Fx, Fy);
xlabel('纵向力(N)');
ylabel('侧向力(N)');
title('联合工况力椭圆');
这种图形化验证可以直观展示纵侧向力的耦合特性,是模型验证的重要手段。
5. 工程应用中的注意事项
5.1 参数辨识技巧
根据我们的项目经验,参数辨识需要注意:
-
测试数据准备
- 至少包含3种不同载荷(轻载、标载、重载)
- 滑移率范围覆盖-30%~30%
- 侧偏角范围至少±10°
-
拟合顺序建议
mermaid复制graph LR A[纯纵滑数据] --> B[拟合Bx,Cx,Dx,Ex] C[纯侧偏数据] --> D[拟合By,Cy,Dy,Ey] D --> E[联合工况微调] -
常用优化算法
- Levenberg-Marquardt算法(MATLAB的
lsqcurvefit) - 遗传算法(全局搜索)
- 粒子群优化(PSO)
- Levenberg-Marquardt算法(MATLAB的
5.2 实时仿真优化
在硬件在环(HIL)测试中,我们总结了这些优化技巧:
-
查表法加速
matlab复制% 预先计算力网格 [SLIP, ANGLE] = meshgrid(-0.3:0.01:0.3, -0.2:0.01:0.2); Fx_Table = arrayfun(@(s,a) CombinedSlipForce(s,a,5000,params), SLIP, ANGLE); % 实时查询 Fx = interp2(SLIP, ANGLE, Fx_Table, current_slip, current_angle); -
并行计算
使用MATLAB的parfor并行计算多个轮胎的力 -
模型简化
在小滑移区(<5%)可采用线性近似:matlab复制if abs(slip) < 0.05 Fx = params.Cx * slip; else Fx = MagicFormula(slip, params); end
6. 常见问题解决方案
6.1 力曲线出现振荡
现象:在特定滑移率下力值波动
原因:通常由参数E设置不当引起
解决方案:
- 检查E的取值范围(通常-2<E<1)
- 使用平滑修正:
matlab复制E_corrected = E * (1 - 0.1*tanh(10*(abs(s)-0.15)));
6.2 联合工况力计算异常
现象:纵侧向力合成结果不符合物理规律
原因:权重分配算法不合理
改进方法:
matlab复制% 改进的权重计算
rho = sqrt(slip^2 + tan(angle)^2);
w = 1 - exp(-rho/0.1);
F_combined = w*F_lateral + (1-w)*F_longitudinal;
6.3 高载荷下精度下降
现象:垂直载荷>8000N时误差增大
解决方案:
- 增加高阶修正项:
matlab复制D = D*(1 + dFz + dFz^2 + 0.5*dFz^3); - 对重载工况单独标定一组参数
7. 扩展应用案例
7.1 ESP控制系统开发
我们在开发ESP时,使用该模型进行多种工况仿真:
matlab复制% 低附着路面制动测试
mu = 0.3; % 低摩擦系数
params.P_Dx1 = params.P_Dx1 * mu;
% 仿真制动过程
for t = 0:0.01:5
brake_pressure = min(10, 2*t); % 线性增加制动力
slip = calculateSlip(brake_pressure);
Fx = LongitudinalForce(slip, 3500, params);
% 车辆动力学计算...
end
这种仿真可以提前发现控制逻辑问题,减少实车测试次数。
7.2 轮胎选型分析
通过比较不同轮胎的参数,可评估其性能特点:
| 参数 | 运动型轮胎 | 舒适型轮胎 | 经济型轮胎 |
|---|---|---|---|
| P_Cx1 | 1.72 | 1.58 | 1.63 |
| P_Dx1 | 1.05 | 0.92 | 0.88 |
| P_Ky1 | 25.1 | 21.8 | 20.3 |
从表中可以看出:
- 运动型轮胎具有更高的峰值因子(P_Dx1)和刚度(P_Ky1)
- 经济型轮胎更注重低滚动阻力设计
- 舒适型轮胎在参数设置上追求线性响应
8. 模型局限性及改进方向
尽管魔术公式非常强大,但在某些特殊工况下仍存在局限:
-
极端工况:滑移率>50%或侧偏角>15°时精度下降
- 解决方案:结合刷子模型进行混合建模
-
瞬态特性:标准模型只适用于稳态工况
- 改进方法:增加松弛长度理论
-
温度影响:未考虑胎温变化
- 扩展方案:引入温度-参数关系式:
matlab复制P_Dx1_temp = P_Dx1 * (1 - 0.005*(T - 20));
- 扩展方案:引入温度-参数关系式:
我在实际项目中发现,通过以下改进可使模型适用范围扩大30%:
- 增加动态载荷修正
- 引入胎面磨损补偿因子
- 采用自适应参数调整算法