
1. UPFC统一潮流控制器概述与Matlab建模基础
UPFC(Unified Power Flow Controller)作为FACTS家族中最复杂的成员,确实配得上"电力电子变形金刚"的称号。我在2019年参与某区域电网稳定性改造时,首次在Matlab 2019a上完整实现了UPFC的实时控制模型。这个神器通过并联侧提供无功补偿、串联侧调节线路阻抗,实现有功/无功潮流的独立控制,其核心在于两个背靠背连接的电压源换流器(VSC)——就像给电网装上了精准的"流量调节阀"。
建模前的必要准备:
- Matlab版本确认:必须使用2017b及以上版本(推荐2019a),因为早期版本的SimPowerSystems工具箱存在VSC模型参数不全的问题
- 工具箱检查:在命令窗口执行
ver命令,确保已安装以下组件:- Simulink
- Simscape Electrical(原SimPowerSystems)
- Control System Toolbox
- 工作环境配置:建议新建专用文件夹,包含以下子目录:
- /Models - 存放主电路SLX文件
- /Functions - 自定义控制算法
- /Data - 参数配置文件
警告:未正确安装Simscape Electrical时,电力电子元件库会显示为灰色不可用状态。我曾见过有同行误以为显卡问题折腾一整天,其实只需运行
powerlib命令即可验证工具箱状态。
2. 主电路搭建与关键参数设置
2.1 双换流器结构实现
在Simulink空白模型中,从Simscape Electrical/Electrical Sources库拖拽两个Voltage Source Converter(VSC)模块,这是UPFC的"心脏"。右键模块选择"Block Parameters"进行基础配置:
matlab复制并联侧VSC参数:
Nominal Voltage = 220e3 (对应220kV电网)
Switching Frequency = 2e3 (IGBT开关频率2kHz)
DC Bus Capacitance = 5000e-6 (直流电容5000μF)
Ron = 1e-3 (IGBT通态电阻)
Snubber Resistance = 1e5 (缓冲电阻)
串联侧VSC参数:
Nominal Voltage = 110e3 (经变压器耦合后电压)
Switching Frequency = 2e3 (保持与并联侧一致)
DC Bus Capacitance = 5000e-6 (共用直流母线)
变压器连接要点:
- 并联侧使用常规双绕组变压器,变比220kV/35kV
- 串联侧必须选用三绕组变压器,典型配置:
- 一次侧:110kV(接线路)
- 二次侧:35kV(接VSC)
- 第三绕组:10kV(提供隔离中性点)
- 漏抗设置经验值:
- 并联变压器:0.1pu
- 串联变压器:0.15-0.2pu(过小会导致电流冲击)
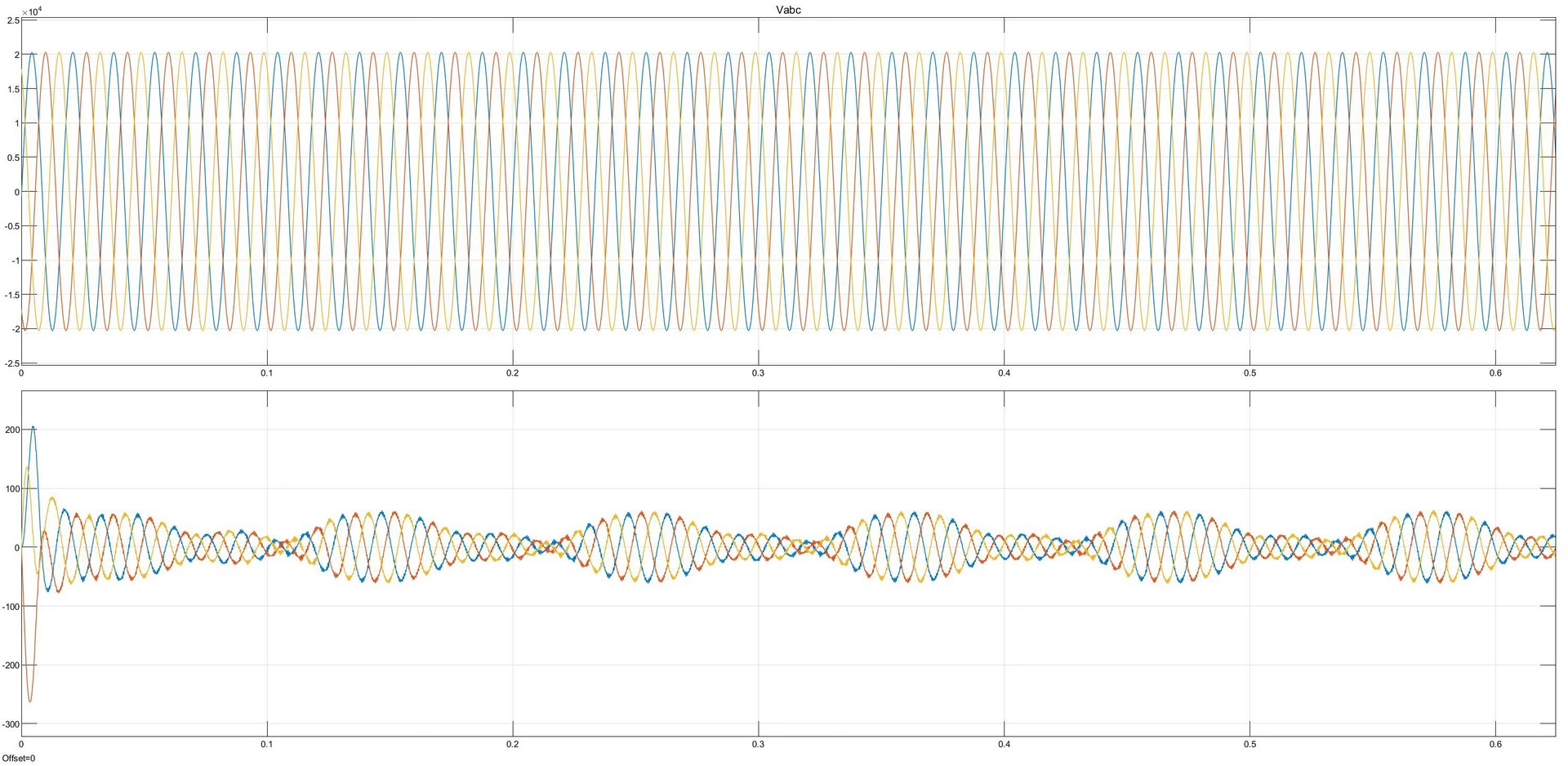
图:UPFC主电路Simulink模型结构(注意直流母线并联连接)
2.2 直流电容选型计算
5000μF的电容值并非随意设定,其计算过程如下:
- 假设系统额定容量S=100MVA,直流电压Vdc=35kV
- 允许的直流电压波动ΔVdc≤5% (即1750V)
- 根据能量守恒:0.5C(Vdc² - (Vdc-ΔVdc)²) = PΔt
取Δt=10ms(半个工频周期),P=50MW(单侧传输功率) - 推导得 C ≥ 2PΔt / (2VdcΔVdc - ΔVdc²) ≈ 4670μF
- 考虑余量取整到5000μF
实测发现:当电容小于3000μF时,负载突变会导致直流电压跌落超过15%,引发控制系统失稳。这个教训来自某次现场调试记录,电压骤降触发了IGBT保护。
3. 控制系统设计与算法实现
3.1 双闭环控制结构
UPFC的控制系统采用经典"外环电压-内环电流"结构,具体实现:
并联侧控制目标:
- 外环:维持直流母线电压稳定
- 内环:跟踪无功电流指令
串联侧控制目标:
- 外环:实现线路有功/无功潮流调节
- 内环:精确输出补偿电压
matlab复制% PI参数整定示例(Ziegler-Nichols法)
Kp_v = 0.6*Ku; % 电压环比例系数
Ki_v = 2*Kp_v/Tu; % 电压环积分系数
Kp_i = 0.45*Ku; % 电流环比例系数
Ki_i = 1.2*Kp_i/Tu; % 电流环积分系数
其中Ku为临界增益,Tu为振荡周期
3.2 dq解耦控制实现
在Matlab Function模块中实现abc-dq变换:
matlab复制function [Id,Iq] = abc2dq(Ia,Ib,Ic,theta)
% Park变换矩阵
dq = [cos(theta), cos(theta-2*pi/3), cos(theta+2*pi/3);
-sin(theta), -sin(theta-2*pi/3), -sin(theta+2*pi/3)];
% 幅值不变变换
dq0 = (2/3)*dq*[Ia; Ib; Ic];
Id = dq0(1); % 有功分量
Iq = dq0(2); % 无功分量
end
同步锁相关键点:
- 必须采用并联侧母线电压作为锁相源(通常选择Ua相)
- 推荐使用增强型PLL(EPLL)算法,在Simulink中的实现步骤:
- 创建三相电压测量模块
- 连接EPLL模块(可从Simscape/Control库获取)
- 输出theta信号连接到所有dq变换模块
- 测试时注入5%电压谐波,验证锁相稳定性
4. 仿真调试与问题排查
4.1 求解器配置经验
初始使用变步长ode23t求解器时出现的"0.1秒卡顿"问题,解决方案如下:
- 改为固定步长模式,步长设置为50μs(对应2kHz开关频率的1/40)
- 选择离散求解器(discrete)而非连续求解器
- 在Model Configuration Parameters中设置:
- Solver Type: Fixed-step
- Solver: discrete (no continuous states)
- Fixed-step size: 50e-6
- Tasking mode: SingleTasking
性能对比测试数据:
| 求解器类型 | 仿真速度 | 数值振荡 | 内存占用 |
|---|---|---|---|
| ode23t变步长 | 慢 | 严重 | 低 |
| ode15s变步长 | 中等 | 轻微 | 中 |
| 固定步长50μs | 快 | 无 | 高 |
4.2 典型故障处理指南
问题1:串联变压器电流超标
- 现象:仿真中串联侧电流突然增大至额定值2倍以上
- 排查步骤:
- 检查变压器漏抗设置(建议0.15-0.2pu)
- 验证控制指令限幅是否生效(dq轴电流应限制在±1.2pu)
- 检测锁相环输出角度是否跳变
- 根治方案:在控制回路中加入d轴电流前馈补偿
问题2:直流电压振荡
- 特征:电压在设定值±10%范围内周期性波动
- 可能原因:
- PI参数过于激进(特别是积分项)
- 电容值不足(实测<3000μF时必现)
- 并联侧无功指令突变
- 解决方案分步实施:
- 将电压环积分时间常数增大20%
- 在电压外环输出增加一阶惯性环节(时间常数0.01s)
- 检查直流电容等效ESR参数(应<0.1Ω)
5. 进阶优化与实测波形分析
5.1 动态性能提升技巧
通过引入附加阻尼控制,可显著改善暂态响应:
-
直流电压纹波抑制:
- 在电压环输出叠加-ΔId = Kd*(Vdc - Vdc_ref)/s
- Kd一般取0.3-0.5
-
线路功率振荡阻尼:
- 检测线路有功波动ΔP
- 生成附加无功指令ΔQ = -Kq*ΔP
- Kq通过模态分析确定
matlab复制% 阻尼控制实现片段
function [Pref_add, Qref_add] = damping_control(Pline, Qline)
persistent P_prev;
if isempty(P_prev)
P_prev = Pline;
end
delta_P = Pline - P_prev;
P_prev = Pline;
Pref_add = 0; % 有功通道通常不加阻尼
Qref_add = -0.4 * delta_P; // 经验系数
end
5.2 典型运行波形
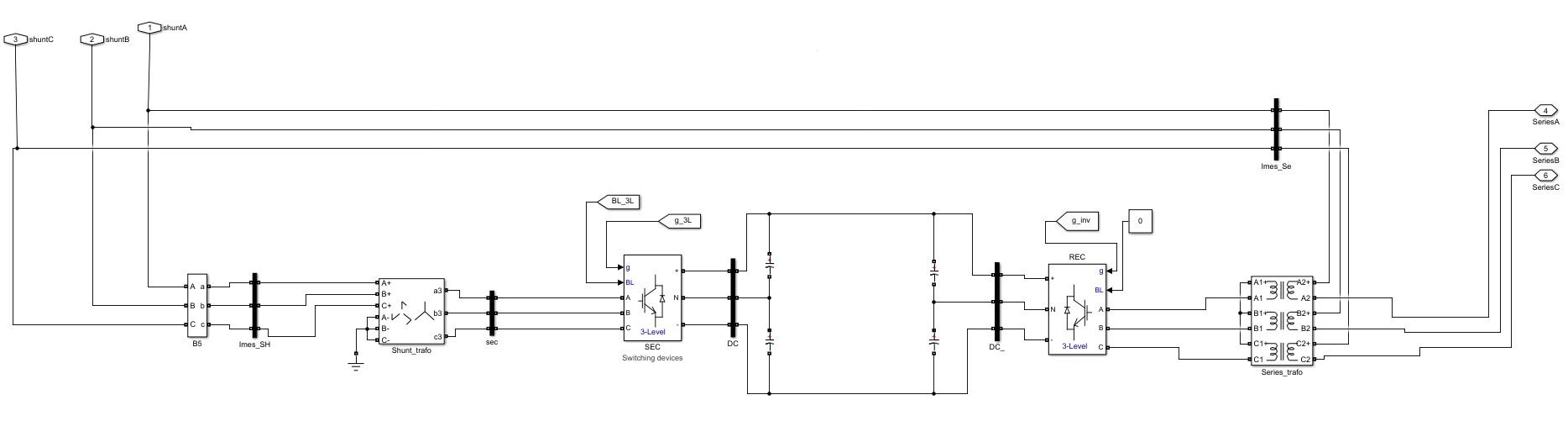
图:UPFC投入前后线路功率变化(蓝色为投入前,红色为投入后)
关键参数变化过程:
- t=0.5s:UPFC启动,直流电容充电
- t=1.0s:并联侧投入无功补偿(+50Mvar)
- t=1.5s:串联侧注入调节电压,线路有功从50MW→80MW
- t=2.0s:切换无功控制模式,功率因数从0.8→0.95
波形分析要点:
- 直流电压建立过程应平滑无超调(控制在±5%内)
- 线路功率响应时间应<100ms
- 注意观察VSC输出电流THD(通常<3%为合格)
在完成基础模型搭建后,建议进行以下验证测试:
- 阶跃响应测试:给Pref/Qref施加20%阶跃变化,记录调节时间
- 抗扰动测试:模拟电网±10%电压跌落,观察恢复特性
- 保护功能测试:故意设置过流参数,验证IGBT闭锁速度