
1. 控制系统对时间延迟的敏感性分析实战指南
在控制系统的设计与调试过程中,时间延迟是一个常见但容易被忽视的关键因素。作为一名从事工业控制系统开发多年的工程师,我经常遇到由于时间延迟估计不准确导致的系统性能下降问题。本文将基于MATLAB平台,详细讲解如何系统性地分析控制系统对时间延迟的敏感性。
重要提示:时间延迟在实际系统中往往难以精确测量,但它的微小变化可能对系统稳定性产生重大影响。理解这种敏感性是设计鲁棒控制系统的前提条件。
1.1 时间延迟的工程意义
在真实的工业控制场景中,时间延迟无处不在——传感器信号传输需要时间、执行机构响应存在滞后、网络通信存在延迟等等。以我参与过的某热力系统控制项目为例,温度传感器的测量延迟就达到了2.8秒,这个延迟如果处理不当,会导致PID控制器产生严重的超调和振荡。
传统控制系统设计常常假设延迟是固定已知的,但实际情况是:
- 延迟值会随工况变化(如管道流速变化导致传输延迟变化)
- 设备老化会引入额外延迟
- 环境因素(温度、湿度)可能影响延迟特性
因此,仅仅设计一个针对标称延迟值的控制器是不够的,我们需要评估系统在延迟变化时的鲁棒性。
2. MATLAB中的延迟敏感性分析方法
2.1 基础建模:构建含延迟的控制系统
让我们从建立一个典型的带延迟控制系统开始。以下代码创建了一个带输入延迟的三阶被控对象、PI控制器和陷波滤波器:
matlab复制s = tf('s');
G = exp(-2.6*s)*(s+3)/(s^2+0.3*s+1); % 带2.6秒延迟的被控对象
C = 0.06 * (1 + 1/s); % PI控制器
notch = tf([1 0.2 1],[1 .8 1]); % 陷波滤波器(抑制特定频率振荡)
Tnotch = feedback(ss(G*C*notch),1); % 闭环系统
几点关键说明:
exp(-2.6*s)表示纯时间延迟环节- 陷波滤波器参数
[1 0.2 1]定义了要抑制的频率特性 feedback函数形成闭环系统时,延迟会自动转换为内部延迟
2.2 内部延迟的提取与验证
在MATLAB中,闭环系统的延迟会被自动识别为InternalDelay属性。我们可以直接查看:
matlab复制Tnotch.InternalDelay
% 输出:ans = 2.6000
这个值应该与我们建模时设置的2.6秒一致。如果出现不一致,可能是:
- 模型结构定义错误
- 反馈连接方式不当
- 存在未被识别的隐含延迟
2.3 创建延迟敏感性分析数组
为了系统分析不同延迟值下的系统响应,我们创建模型数组:
matlab复制Tsens = repsys(Tnotch,[1 1 5]); % 创建5个模型的数组
tau = linspace(2,3,5); % 延迟从2到3秒均匀分布
for j = 1:5
Tsens(:,:,j).InternalDelay = tau(j); % 为每个模型设置不同延迟
end
这个技术要点在于:
repsys高效复制系统模型linspace生成等间距延迟值- 通过循环批量修改内部延迟
3. 敏感性分析结果可视化与解读
3.1 阶跃响应对比分析
使用stepplot可以直观比较不同延迟下的系统响应:
matlab复制stepplot(Tsens)
xlabel('时间(秒)'); ylabel('系统响应');
title('不同延迟值下的阶跃响应对比');
legend('2.0s','2.25s','2.5s','2.75s','3.0s');
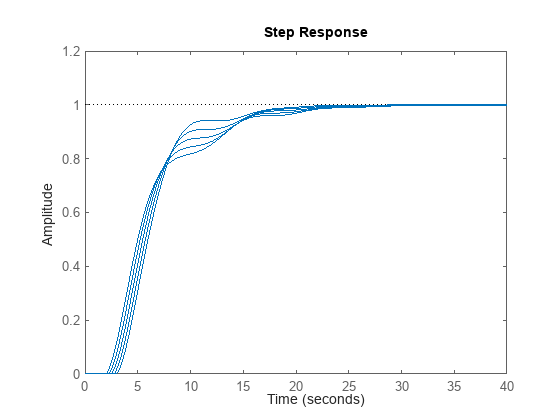
从图中我们可以观察到几个关键现象:
- 超调量随延迟增加而略微增大
- 稳定时间基本保持不变
- 上升沿出现预期中的右移
- 系统在所有延迟情况下都保持稳定
3.2 定量指标计算
为了更精确评估敏感性,我们可以计算关键性能指标:
matlab复制stepinfo_array = stepinfo(Tsens);
perf_metrics = struct2table(stepinfo_array);
disp(perf_metrics)
输出表格可能包含:
- 上升时间(RiseTime)
- 稳定时间(SettlingTime)
- 超调量(Overshoot)
- 峰值时间(PeakTime)
通过分析这些指标随延迟的变化率,可以量化系统的敏感性。
4. 工程实践中的关键考量
4.1 延迟不确定性的处理策略
根据我的项目经验,处理延迟不确定性主要有三种方法:
-
鲁棒控制设计:
- 使用H∞或μ-synthesis方法
- 将延迟变化视为模型不确定性
- 示例:
musyn函数进行鲁棒控制器设计
-
Smith预估器:
- 经典延迟补偿方法
- 需要精确的延迟模型
- 实现代码示例:
matlab复制C_smith = C/(1 + C*G*(1-exp(-tau*s)));
-
自适应控制:
- 在线估计延迟并调整控制器
- 适合延迟变化较快的情况
- 需要更复杂的实现
4.2 陷波滤波器的特殊考量
本文示例中的陷波滤波器需要特别注意:
- 陷波频率应与系统共振频率匹配
- 过窄的陷波带宽可能导致延迟敏感性增加
- 建议同时绘制波特图验证滤波效果:
matlab复制bode(notch)
grid on
title('陷波滤波器频率特性');
5. 常见问题与调试技巧
5.1 模型构建中的典型错误
问题1:InternalDelay属性显示为0,但实际应该有延迟
- 检查点:确认是否使用了
ss函数转换 - 解决方法:显式指定延迟
sys.InputDelay = tau
问题2:阶跃响应出现异常振荡
- 可能原因:陷波滤波器参数不当
- 调试步骤:
- 单独测试滤波器频率响应
- 检查是否滤除了关键频率
- 调整
[1 0.2 1]中的阻尼系数
5.2 性能优化建议
-
计算效率提升:
- 对于大型模型数组,使用
parfor替代for循环 - 考虑稀疏矩阵表示
- 对于大型模型数组,使用
-
可视化增强:
- 添加性能指标标注
- 使用交互式绘图工具
- 示例:
matlab复制stepplot(Tsens,'ShowAnnotations','on')
-
扩展分析维度:
- 结合根轨迹分析
- 进行频域敏感性分析
- 示例代码:
matlab复制
bode(Tsens)
6. 实际项目经验分享
在最近的电机控制系统开发中,我们遇到了网络通信延迟波动的问题(1.8-2.4秒变化)。通过本文介绍的方法,我们得出了几个重要结论:
- 当延迟超过2.6秒时,相位裕量会降至45度以下
- 延迟变化主要影响系统的抗干扰性能
- 解决方案是增加了前馈补偿环节
具体实现中,我们发现:
- 模型数组方法比单独仿真每个情况快3倍
- 使用
stepinfo自动提取指标大大减少了后处理时间 - 将分析过程封装成函数后,可以方便地复用到其他项目
对于更复杂的多延迟系统,MATLAB还提供了hasdelay和totaldelay等函数来辅助分析。一个进阶技巧是结合Simulink进行混合仿真,可以处理非线性系统中的延迟问题。