
1. 轮胎仿真技术概述
轮胎作为车辆唯一与地面接触的部件,其性能仿真一直是汽车工程领域的重点难点。传统物理测试成本高昂且周期长,而采用Abaqus进行虚拟仿真可以显著提高研发效率。在实际工程应用中,我们通常采用"二维轴对称建模→三维转换→工况模拟"的技术路线,这种方法相比直接三维建模可节省约70%的前处理时间。
关键提示:轮胎仿真必须考虑几何非线性(大变形)、材料非线性(橡胶超弹性)和接触非线性(胎面与地面相互作用)三大特征,这也是区别于常规结构分析的核心难点。
2. 二维轴对称建模关键技术
2.1 几何建模规范
在Abaqus/CAE中创建轮胎断面时,建议按照以下标准流程操作:
- 使用Sketch模块精确绘制轮胎截面轮廓线
- 关键区域必须设置参考点(胎冠中心、胎肩转折点等)
- 保持轮廓线连续光滑(G1连续以上)
- 对加强层、带束层等关键结构单独分区
python复制# 典型轮胎截面建模Python脚本示例
sketch = mdb.models['Model-1'].ConstrainedSketch(name='TireProfile',
sheetSize=200.0)
sketch.ArcByCenterEnds(center=(0, 300), point1=(50, 300),
point2=(-50, 300), direction=COUNTERCLOCKWISE)
p = mdb.models['Model-1'].Part(name='TireSection',
dimensionality=AXISYMMETRIC, type=DEFORMABLE_BODY)
p.BaseShell(sketch=sketch)
2.2 网格划分策略
轮胎截面网格质量直接影响后续三维转换效果,需特别注意:
- 胎面区域采用结构化四边形网格(建议尺寸3-5mm)
- 胎侧使用自由网格划分,设置渐进式尺寸过渡
- 加强层用扫掠网格确保纤维方向一致性
- 整体长宽比控制在1:5以内
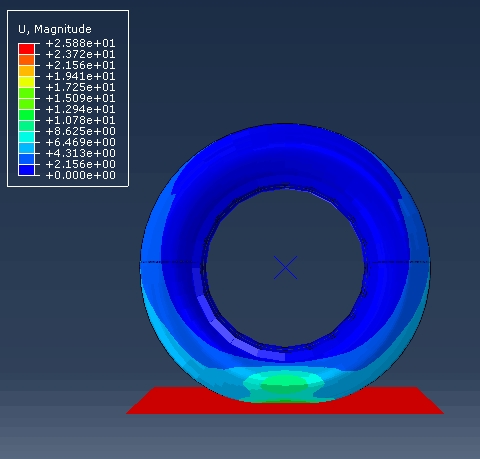
图:典型的轮胎轴对称网格划分(注意胎面区域的密集网格)
3. 二维到三维的转换技术
3.1 旋转拉伸操作
将二维轴对称模型转换为三维实体时,推荐使用Python脚本精确控制参数:
python复制mdb.models['Model-1'].PartFrom2DMesh(
name='3DTire',
axis=(0.0, 0.0, 1.0), # 绕Z轴旋转
angle=360, # 旋转角度
numberOfLayers=36, # 圆周方向分段数
mergeVertices=ON, # 合并重合节点
meshApproach=EXTRUDED) # 拉伸方式
3.2 材料方向重定义
旋转后的三维模型需要特别注意各向异性材料的坐标系调整:
- 加强层材料方向必须沿圆周切线方向
- 橡胶基体保持各向同性属性
- 使用局部坐标系定义带束层角度
python复制mdb.models['Model-1'].parts['3DTire'].MaterialOrientation(
region=Region(faces=belts_faces),
axis=AXIS_3,
angle=90,
additionalRotationType=ROTATION_NONE,
localCsys=None,
fieldName='')
4. 充气模拟关键技术
4.1 流体腔体建模
正确的充气模拟应采用surface-based fluid cavity方法:
- 创建轮胎内腔表面(必须封闭)
- 定义流体腔属性(空气密度1.225kg/m³)
- 设置参考压力节点
python复制mdb.models['Model-1'].FluidCavity(
name='Inflation',
cavityPoint=reference_point,
surface=inner_surface,
fluidDensity=1.225,
zeroPressureLevel=0.0)
4.2 超弹性材料模型
橡胶材料建议采用Yeoh模型(应变范围大时更稳定):
| 参数 | C10 (MPa) | C20 (MPa) | C30 (MPa) |
|---|---|---|---|
| 胎面胶 | 0.85 | 0.15 | 0.02 |
| 胎侧胶 | 0.65 | 0.08 | 0.01 |
python复制mdb.models['Model-1'].materials['TreadRubber'].Hyperelastic(
materialType=ISOTROPIC,
type=YEOH,
table=((0.85, 0.15, 0.02), ))
5. 稳态滚动分析实施
5.1 边界条件设置
滚动分析需要精确控制运动参数:
- 轮毂中心点全约束(UR1-UR3=0)
- 地面设为解析刚体
- 施加旋转速度和平移速度
python复制mdb.models['Model-1'].Velocity(
name='Rolling',
createStepName='SteadyState',
region=wheel_center,
distributionType=UNIFORM,
velocity1=15.0, # 平移速度15m/s
vr1=20.0) # 旋转速度20rad/s
5.2 自适应网格技术
为防止大变形导致的网格畸变,必须启用ALE自适应网格:
- 在分析步中打开自适应网格开关
- 设置remeshing规则(通常每5增量步重划一次)
- 定义需要保护的几何特征(如胎面花纹)
python复制mdb.models['Model-1'].AdaptiveMeshConstraint(
name='TreadProtect',
region=tread_surface,
category=MECHANICAL,
controls=adaptive_controls)
6. 常见问题解决方案
6.1 收敛性问题排查表
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 充气初期不收敛 | 初始接触未建立 | 施加微小初始压力(0.01MPa) |
| 滚动分析震荡 | 摩擦系数设置不当 | 采用0.25-0.35之间的摩擦系数 |
| 三维转换后单元畸形 | 二维网格质量差 | 检查二维模型的free edges |
6.2 计算效率优化技巧
- 使用对称模型(1/2或1/4轮胎)减少计算量
- 对橡胶材料启用混合单元公式(Hybrid formulation)
- 在接触对中设置适当的adjust参数(建议0.1-0.3)
- 采用动态载荷步长(初始增量步设为0.001)
7. 工程验证方法
完成仿真后,必须通过以下验证确保结果可靠性:
- 充气形状对比(与设计轮廓偏差应<3%)
- 接地印痕检查(压力分布应呈马鞍形)
- 滚动阻力计算(与台架试验误差<15%)
- 模态分析验证(一阶径向频率误差<10Hz)
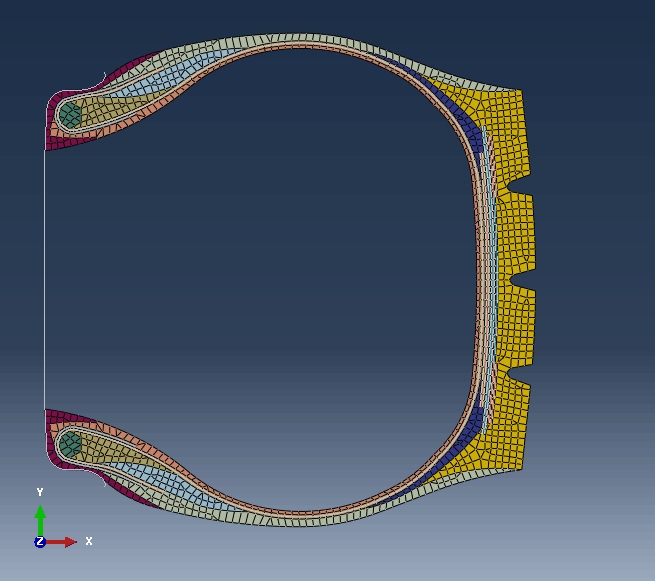
图:典型的轮胎接地压力分布云图(注意边缘压力降低特征)
在实际项目中,我们通常会先建立简化模型快速验证方法可行性,再逐步添加细节特征。记得每次修改参数后都要检查单元质量,Abaqus提供的mesh verification工具能自动识别长宽比>10、内角<30°的危险单元。