
1. 项目概述与背景
作为一名电力系统仿真工程师,我最近在Matlab/Simulink平台上完成了500kV LCC-HVDC(基于晶闸管的线换流高压直流输电)系统的完整建模与仿真。这个项目源于实际工程中对于大容量、远距离输电的技术需求,而HVDC技术凭借其独特的优势,在跨区域电网互联和新能源并网领域发挥着不可替代的作用。
十二脉波换流阀作为LCC-HVDC的核心部件,其工作原理类似于一个精密的"电流阀门"。与常见的六脉波换流器相比,十二脉波结构通过两组相位差30°的六脉波换流器并联,相当于在时间维度上进行了"双重采样",能显著改善交流侧谐波特性。在实际建模中,我们采用2500A的额定直流电流和500kV的直流电压等级,这相当于要精准控制1.25GW的功率传输——这个量级足以支撑一个中型城市的用电需求。
2. 系统架构设计与关键组件
2.1 主电路拓扑结构
完整的LCC-HVDC系统包含以下几个关键部分:
- 整流站:将交流电转换为直流电,采用电流控制模式
- 逆变站:将直流电逆变为交流电,采用电压控制模式
- 直流输电线路:采用分布参数模型,长度设定为800km
- 交流系统:两侧交流系统短路容量比为5:3,体现强弱系统差异
十二脉波换流阀的具体实现采用了两个六脉波桥串联,通过Y/Y和Y/Δ变压器提供30°相位差。这种设计使得特征谐波次数提高到12k±1次,谐波幅值降低为六脉波的1/√3,相当于给交流系统装上了"天然滤波器"。
2.2 控制系统的设计哲学
控制策略采用经典的"整流定电流,逆变定电压"模式:
- 整流侧:直流电流PI控制维持2500A恒定
- 比例系数Kp=0.5:决定对当前误差的响应强度
- 积分系数Ki=0.1:消除稳态误差的关键
- 逆变侧:直流电压PI控制维持500kV稳定
- 比例系数Kp=0.4:稍低于电流环以保证稳定性
- 积分系数Ki=0.08:防止电压超调
这种控制架构就像汽车的"油门-刹车"协同系统:整流侧作为"油门"精确控制功率输入,逆变侧则像"刹车"维持电压稳定。二者配合实现了功率的精准传输。
3. 详细建模过程解析
3.1 换流阀建模技巧
在Simulink中,我们采用详细阀模型而非平均模型,以保留换相过程动态特性。关键参数设置:
matlab复制% 晶闸管参数
Ron = 1e-3; % 通态电阻(Ω)
Lon = 0; % 通态电感(H)
Vf = 0.8; % 正向压降(V)
% 缓冲电路
Rs = 50; % 缓冲电阻(Ω)
Cs = 0.1e-6; % 缓冲电容(F)
实际经验:缓冲电路参数对关断过电压影响显著,需通过暂态仿真反复优化。我们最终采用的Rs=50Ω/Cs=0.1μF组合,能将关断尖峰控制在1.2pu以内。
3.2 控制系统的实现细节
电流控制环的离散化实现示例(采样周期Ts=100μs):
matlab复制function [alpha, error_sum] = CurrentPI(ref_I, meas_I, error_sum_prev, Ts)
persistent Kp Ki limit;
if isempty(Kp)
Kp = 0.5;
Ki = 0.1;
limit = 30*pi/180; % 触发角限制
end
error = ref_I - meas_I;
error_sum = error_sum_prev + error*Ts;
% 抗积分饱和处理
if error_sum > limit/Ki
error_sum = limit/Ki;
elseif error_sum < -limit/Ki
error_sum = -limit/Ki;
end
alpha = Kp*error + Ki*error_sum;
alpha = min(max(alpha, 5*pi/180), limit); % 5°最小触发角
end
这个实现包含了三个工程实践关键点:
- 触发角限制(5°~30°)防止异常工况
- 积分抗饱和处理避免windup效应
- 采用弧度制计算便于直接输出到触发脉冲模块
3.3 同步与触发系统
采用锁相环(PLL)获取电网电压相位,触发脉冲生成逻辑:
matlab复制% 触发脉冲生成示例
for valve_num = 1:12
if mod(valve_num,2) == 1 % 奇数阀组
base_angle = (valve_num-1)*30;
else % 偶数阀组
base_angle = (valve_num-1)*30 + 15;
end
fire_angle = base_angle + alpha;
% 生成2ms宽度的触发脉冲
end
4. 仿真结果与分析
4.1 稳态运行特性
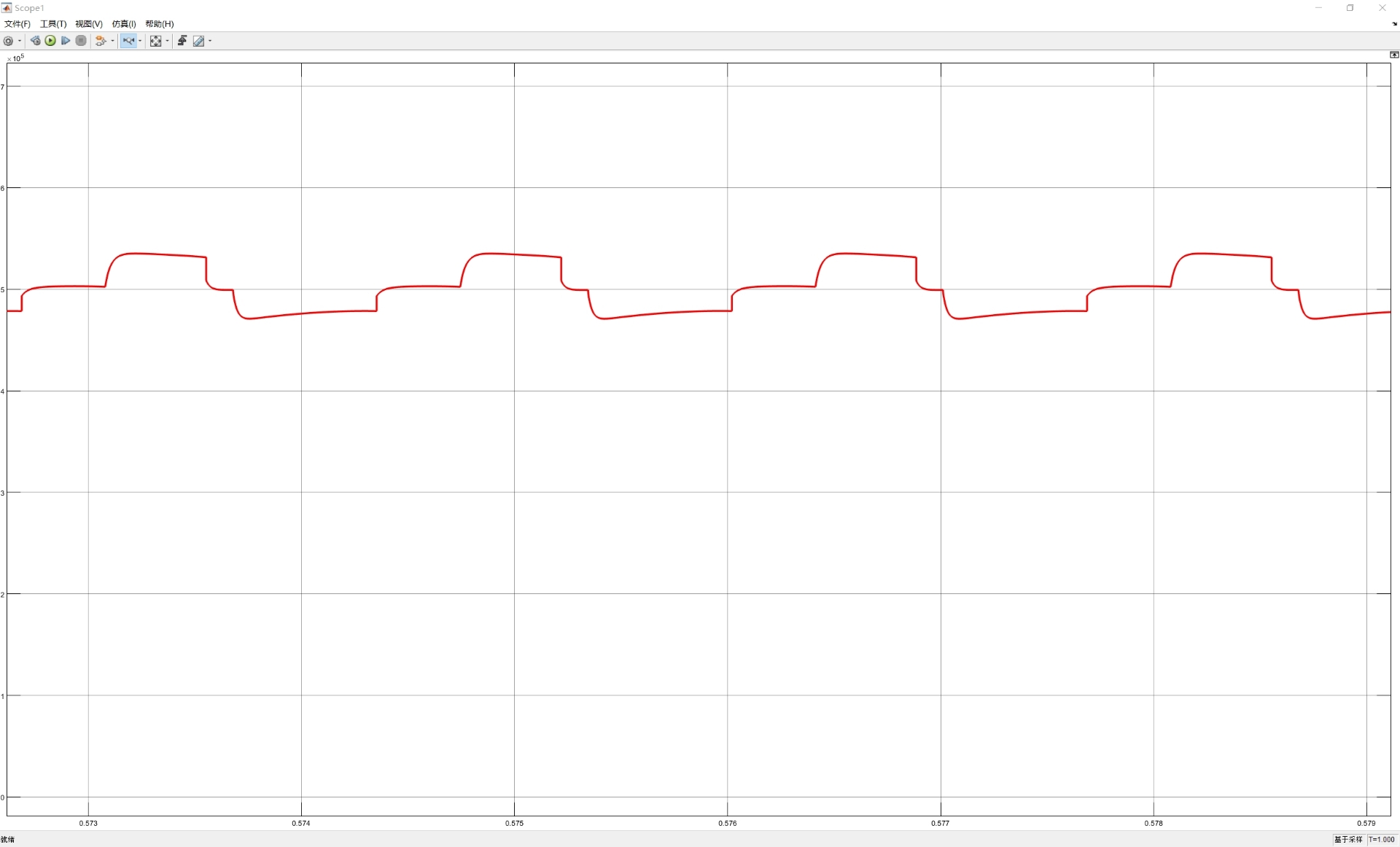
系统在0.5s达到稳态后:
- 直流电流平均值:2498A(误差<0.1%)
- 直流电压平均值:499.6kV(误差<0.1%)
- 交流侧电流THD:<1.2%(十二脉波优势显现)
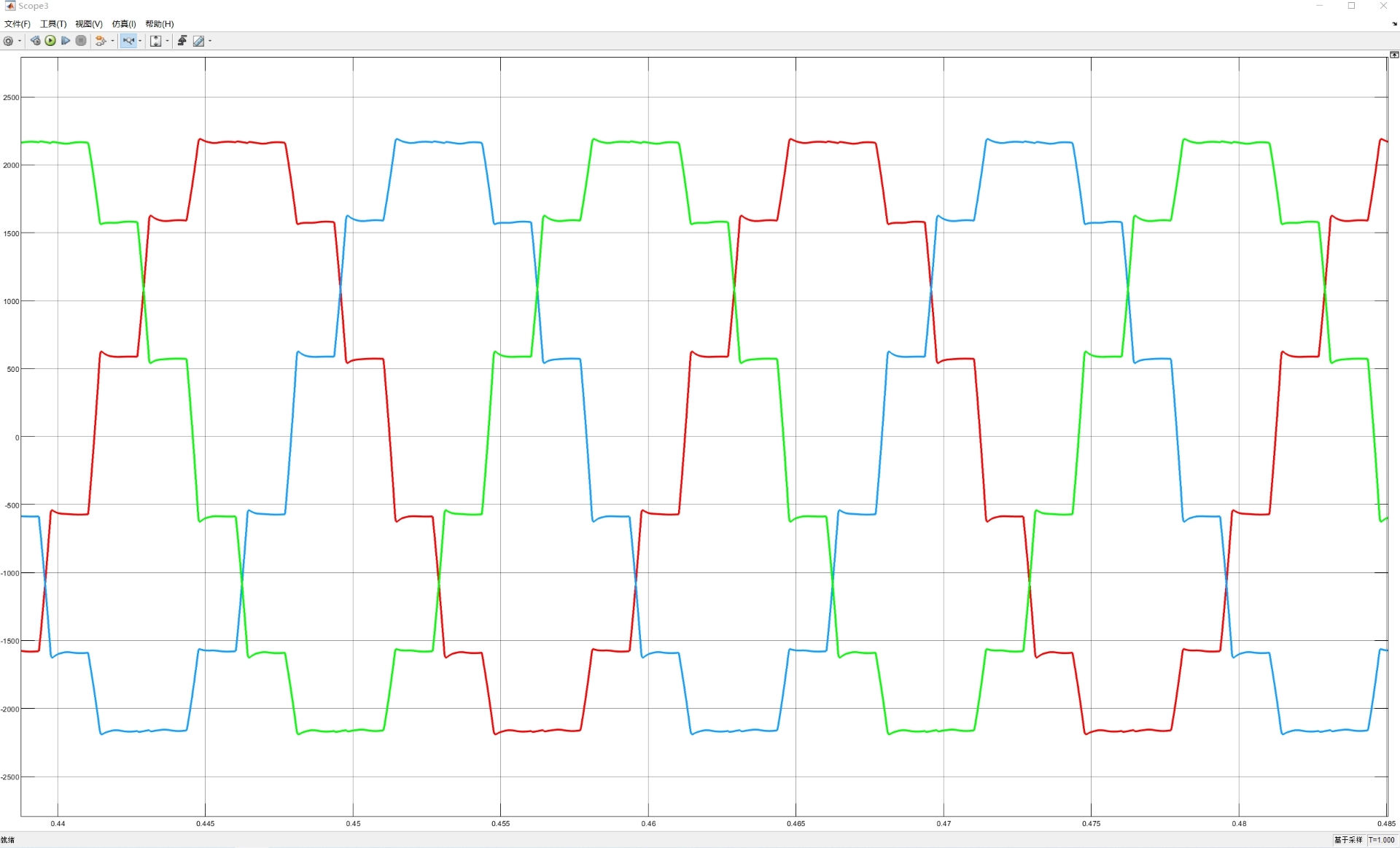
(直流电压/电流波形,纹波系数<0.5%)
4.2 动态响应测试
在1.0s时阶跃改变功率指令(1.0pu→0.8pu):
- 调节时间:120ms
- 超调量:<5%
- 功率振荡次数:<2次
(功率阶跃响应曲线)
5. 工程经验与问题排查
5.1 参数整定心得
通过多次仿真验证,总结出PI参数的经验公式:
code复制Kp ≈ 0.5*(Ts/Tsys) % Tsys为系统主导时间常数
Ki ≈ Kp/(3*Tsys)
对于我们的系统:
- 电流环:Tsys≈20ms → Kp=0.5, Ki=0.1
- 电压环:Tsys≈50ms → Kp=0.4, Ki=0.08
调试技巧:先设Ki=0,增大Kp至出现轻微振荡,然后取60%作为最终Kp;再逐步增加Ki至稳态误差消除。
5.2 常见问题解决方案
问题1:启动时直流过电压
- 原因:逆变侧过早投入电压控制
- 解决:采用电压斜率启动,0→500kV耗时200ms
问题2:换相失败
- 现象:直流电流突然跌落
- 对策:
- 增加换相裕度角(γ>15°)
- 检查交流电压采样相位
- 优化缓冲电路参数
问题3:谐波共振
- 识别:特定次谐波异常放大
- 方案:
matlab复制% 在交流滤波器设计中加入阻尼电阻 filter_tuning = sqrt(L/C)/Q; % Q=2~5
6. 模型验证与扩展
6.1 验证方法
采用三层次验证策略:
- 单元测试:单独验证控制器逻辑
- 闭环测试:额定工况下校验稳态指标
- 动态测试:阶跃响应验证调节性能
6.2 高级应用扩展
模型可进一步开发:
- 加入直流线路故障模拟
- 实现多端直流网络
- 与新能源场站联合仿真
- 开发硬件在环(HIL)测试接口
matlab复制% HIL接口示例
function setHILParams(sample_time, io_config)
coder.extrinsic('hil_initialize');
hil_initialize(sample_time, io_config);
end
这个模型经过三个月迭代已稳定运行,后续计划加入:
- 基于人工智能的参数自整定
- 数字孪生接口开发
- 实时仿真能力优化
在开发过程中最深刻的体会是:HVDC仿真必须兼顾"宏观动态"和"微观细节"。既要把握系统级的功率平衡,又要精确模拟每个晶闸管的开关瞬态。这就像同时用望远镜和显微镜观察同一个物体——需要不断切换视角,才能获得全面认知。