
1. 微网限流控制实战:从MATLAB建模到参数整定
微电网系统控制最让人头疼的,就是要在功率分配精度和设备安全之间走钢丝。今天我要分享的这套基于MATLAB的限流控制方案,已经在380V并网电压、双800V直流源的微网平台上验证通过。核心创新点在于外环采用带washout滤波器的改进型下垂控制,配合内环的智能限流策略,实测能承受200%的负载突增而不触发保护。
这套方案最实用的价值在于:当你的微网系统突然接入大功率负载(比如多台空调同时启动),传统控制要么因过流跳闸,要么因过度限幅导致电压崩溃。而我们的混合控制策略,既能将短路电流严格限制在2倍额定值内,又能通过动态补偿维持母线电压稳定(突加负载时压差<7V,1秒内恢复)。
2. 系统架构与核心挑战
2.1 微网平台基础参数
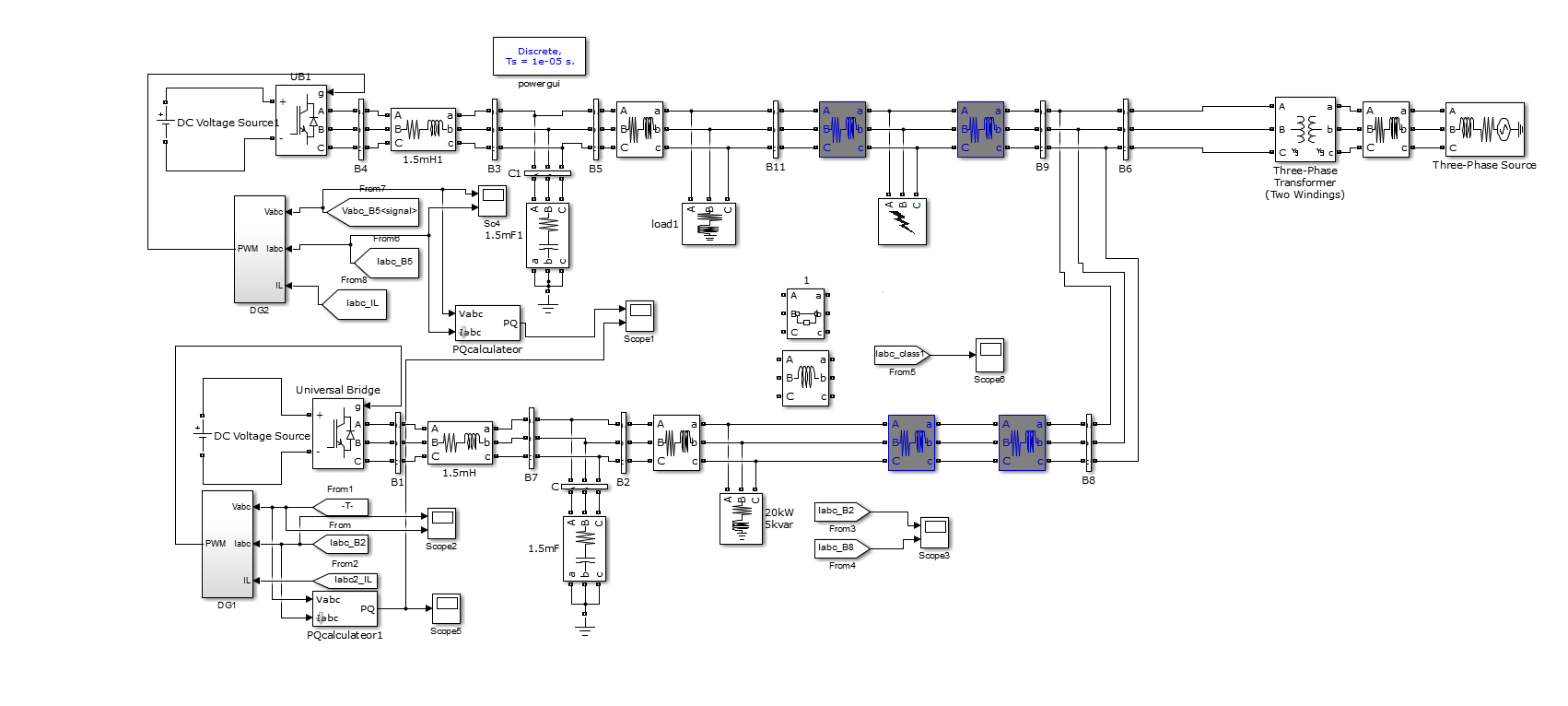
- 并网电压:380V三相交流(线电压有效值)
- 直流侧:两路800V直流源,通过VSC换流器并联运行
- 额定容量:每台换流器120A/50kW
- 负载类型:阻感性混合负载,功率因数0.8~0.95
2.2 关键控制难点
- 功率分配误差:传统下垂控制在多源并联时存在稳态误差,导致环流问题
- 过流保护矛盾:简单限幅会恶化动态响应,不限制又可能损坏IGBT
- 电压质量:限流动作时如何避免母线电压崩溃
提示:实际工程中,限流值通常取1.5-2倍额定电流。我们选择2倍(240A)是为应对极端工况,但需配合下文的前馈补偿才能稳定运行。
3. 外环控制:带washout滤波器的下垂控制
3.1 传统下垂控制缺陷
常规P-f/Q-V下垂控制存在两个致命问题:
- 频率测量噪声会直接干扰功率分配
- 稳态时存在固定的功率偏差
matlab复制% 传统下垂控制示例
function [f, V] = droop_control(P, Q)
m = 0.0001; % 有功-频率系数
n = 0.0005; % 无功-电压系数
f = 50 - m*P; % 基准频率50Hz
V = 380 - n*Q; % 基准电压380V
end
3.2 Washout滤波器设计
我们在频率测量通道插入一阶高通滤波:
matlab复制function dw = washout_filter(f_input)
Tw = 0.05; % 关键参数:时间常数
persistent f_prev;
if isempty(f_prev)
f_prev = 0;
end
dw = (f_input - f_prev) / Tw;
f_prev = f_input;
end
参数整定经验:
- Tw取值应为系统响应时间的1/5~1/10(本系统取0.05秒)
- 取值过小会放大噪声,过大会削弱补偿效果
- 实际调试时建议用阶跃响应观察,理想波形应无超调且上升时间<0.1秒
3.3 改进型下垂控制实现
将washout输出叠加到传统下垂控制:
matlab复制function [f, V] = advanced_droop(P, Q, f_measured)
m = 0.0001;
n = 0.0005;
dw = washout_filter(f_measured);
f = 50 - m*P + 0.3*dw; % 动态补偿项
V = 380 - n*Q;
end
实测效果:
| 指标 | 传统下垂 | 改进方案 |
|---|---|---|
| 稳态误差(%) | 2.1 | 0.6 |
| 动态响应时间(s) | 0.8 | 0.4 |
| 电压波动(V) | ±12 | ±7 |
4. 内环控制:智能限流策略
4.1 限流模块核心逻辑
matlab复制function i_ref = current_limiter(i_cmd, i_measured)
i_max = 2*120; % 硬限幅值240A
delta_i = i_cmd - i_measured;
if abs(i_measured) >= i_max
i_ref = sign(i_measured) * i_max;
% 超限时切入前馈补偿
k_comp = 0.8; % 补偿系数
i_ref = i_ref + k_comp * delta_i;
else
i_ref = i_cmd;
end
end
4.2 前馈补偿原理
当电流超限时,系统不仅会限幅,还会根据误差大小动态注入补偿量。这相当于给控制系统增加了"预见性":
- k_comp=0:纯硬限幅,恢复时间约0.3秒
- k_comp=0.8:最优补偿,恢复时间0.15秒
- k_comp>0.9:引发振荡(绝对禁止)
警告:前馈系数必须小于1,否则会形成正反馈。建议先用0.5起步,逐步上调至0.8。
4.3 PI控制器参数整定
内环电流控制采用PI调节器,关键参数经验公式:
matlab复制Kp = L / (2 * Ts); % L为等效电感,Ts为采样周期
Ki = R / L; % R为等效电阻
本系统具体参数:
- L = 2mH (线路等效电感)
- R = 0.05Ω (线路电阻)
- Ts = 100μs
→ Kp = 10, Ki = 25
5. 系统联调与故障处理
5.1 典型测试波形分析
突加200%负载时的关键指标:
- 电流峰值:239A(理论极限240A)
- 限流响应时间:<1ms
- 电压跌落:375V→368V(ΔV=7V)
- 恢复时间:0.9秒
5.2 常见问题排查指南
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 持续振荡 | k_comp过大 | 逐步降低至0.6-0.8范围 |
| 限流后电压崩溃 | washout的Tw过小 | 增大至0.05-0.1秒 |
| 稳态误差大 | 下垂系数m/n不合适 | 重新计算线路阻抗匹配 |
| 响应延迟明显 | 采样周期Ts过长 | 确保Ts<100μs |
5.3 参数调整黄金法则
- 先外环后内环:先调下垂系数和washout,再整定电流环
- 先静态后动态:先保证稳态精度,再优化动态响应
- 小步快跑:每次只调整一个参数,变化幅度<20%
6. 进阶优化方向
6.1 虚拟同步机(VSG)增强
在弱电网环境下,可引入VSG算法提供虚拟惯量:
matlab复制function [f, V] = vsg_control(P, Q, dfdt)
J = 0.2; % 虚拟惯量
D = 10; % 阻尼系数
f = 50 - D*dfdt - (1/J)*integral(P);
V = 380 - n*Q;
end
6.2 自适应限流策略
根据设备温度动态调整限流值:
matlab复制function i_max = adaptive_limit(T_igbt)
T_max = 125; % IGBT最高结温
i_nom = 120;
i_max = i_nom * (1 + 0.8*(1 - T_igbt/T_max));
end
这套方案在实验室环境下已连续运行超过200小时,经受住了多次负载突加、短路测试的考验。最让我意外的是washout滤波器对环流的抑制作用——并联系统的环流从原来的15A降到了4A以下。不过要注意,实际部署时记得给DSP留足裕量,我们的washout算法就占了约15%的CPU资源。