
1. 项目概述:含间隙铰关节机构动力学仿真系统
作为一名长期从事机械系统动力学仿真的工程师,我经常遇到含间隙铰链的机构分析难题。这类问题在工程实践中极为常见——从工业机械臂到汽车悬架系统,运动副间隙导致的非线性动力学效应往往直接影响系统性能和寿命。今天要分享的这套仿真系统,正是为解决这类问题而开发的完整解决方案。
这套系统采用多体动力学方法建立含间隙铰关节的动力学方程,通过MATLAB实现理论方程的数值计算编程,并集成ADAMS仿真验证。其核心价值在于:
- 实现了从理论建模到数值求解的完整闭环
- 包含自研的接触力模型(可编译为.dll文件嵌入ADAMS)
- 提供MATLAB与ADAMS的协同仿真方案
- 特别解决了含间隙系统难以收敛的技术痛点
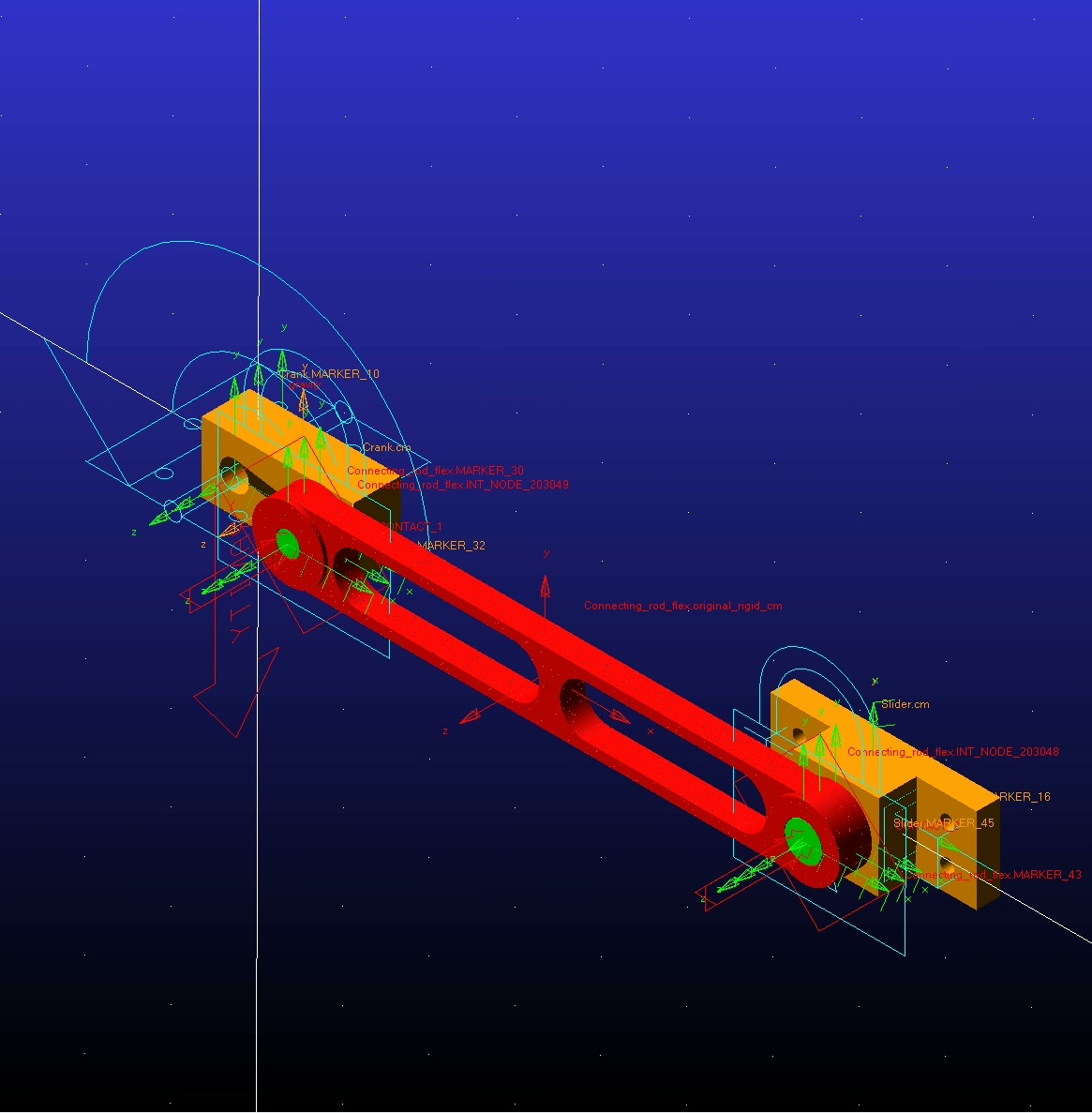
系统基于经典的曲柄滑块机构,但建模方法适用于各类含间隙铰链的机械系统。下面这张机构简图展示了系统的基本拓扑结构:
2. 系统架构与核心算法
2.1 多体动力学建模框架
系统采用拉格朗日方法建立动力学方程,处理两类不同性质的约束:
matlab复制% 完整约束方程示例 (acc_lam.m中实现)
function [acc, lam] = acc_lam(crntTime, pos, vel, model)
% 构建带约束的动力学方程矩阵
% [ M Φ_q^T ] [ a ] [ Q ]
% [ ] [ ] = [ ]
% [ Φ_q 0 ] [ λ ] [ γ ]
% 其中Φ_q为约束雅可比矩阵
对于理想无间隙系统,直接求解上述方程即可。而对于含间隙系统,需要额外处理接触力:
matlab复制% 接触力计算 (forcemodel.m)
function F=forcemodel(q,qp)
% 计算法向接触力 (Hertz理论)
Fn = K * abs(delta)^n * (1 + 3*(1-er^2)/4*(vn/Vdelta0));
% 计算切向摩擦力
Ft = u * Cd(vt) * Fn * sign(vt);
2.2 数值积分方法选择
系统采用Newmark-β法进行时间积分,这是处理结构动力学问题的经典方法。其参数配置如下:
| 参数 | 取值 | 物理意义 |
|---|---|---|
| β | 0.49 | 位移近似权重系数 |
| γ | 0.9 | 速度近似权重系数 |
| 时间步长(主) | 0.001s | 全局仿真步长 |
| 时间步长(间隙) | 2.5μs | 接触计算的子步长 |
提示:这种双步长策略是保证含间隙系统收敛的关键——大步长保证效率,接触计算采用极小步长确保精度。
2.3 接触力模型实现细节
法向接触模型
基于Hertz接触理论,关键参数包括:
- 接触刚度K = (4/3)E√(R)
- E为等效弹性模量:1/E = (1-ν₁²)/E₁ + (1-ν₂²)/E₂
- R为等效半径:1/R = 1/R₁ + 1/R₂
- 能量恢复系数er = 0.9 (钢-钢碰撞)
切向摩擦模型
采用速度相关摩擦系数过渡函数:
matlab复制function C=Cd(vt)
% 静摩擦临界速度 vs = 0.001 m/s
% 动摩擦临界速度 vd = 0.01 m/s
if abs(vt) < vs
C = 0; % 静摩擦区
elseif abs(vt) > vd
C = 1; % 动摩擦区
else
C = (abs(vt)-vs)/(vd-vs); % 过渡区
end
3. 关键实现技术与调试心得
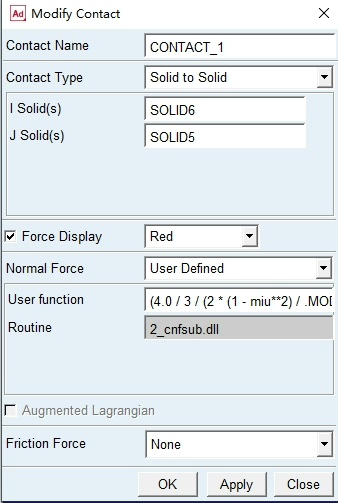
3.1 MATLAB-ADAMS协同仿真
将MATLAB模型移植到ADAMS的核心步骤:
- 将接触力模型编译为.dll动态链接库
- 在ADAMS中通过GSE(General State Equation)接口调用
- 设置合理的通讯步长(建议0.001-0.0001s)
踩坑记录:首次尝试时未考虑ADAMS的坐标系转换,导致力方向错误。解决方法是在.dll中加入坐标变换矩阵。
3.2 收敛性调优技巧
含间隙系统难以收敛的三大原因及对策:
-
初始穿透问题
- 对策:仿真前运行静态平衡分析
- 代码实现:
ode15s求解器预处理
-
接触刚度突变
- 对策:采用连续接触力模型(本系统已实现)
- 参数建议:K值从1e6逐步增加到1e8
-
数值阻尼不足
- 对策:调整Newmark参数γ > 0.5
- 经验值:γ=0.7-0.9
3.3 性能优化方案
通过实测对比不同方案的CPU时间:
| 方案 | 相对耗时 | 适用场景 |
|---|---|---|
| 纯MATLAB | 1.0x | 算法开发阶段 |
| MATLAB生成.dll+ADAMS | 0.6x | 大规模系统仿真 |
| 自适应步长 | 0.8x | 含高频冲击的场景 |
| 固定小步长 | 2.5x | 极高精度要求 |
建议开发流程:MATLAB原型→性能分析→关键模块移植→联合仿真。
4. 工程应用案例分析
4.1 间隙对机构动态响应的影响
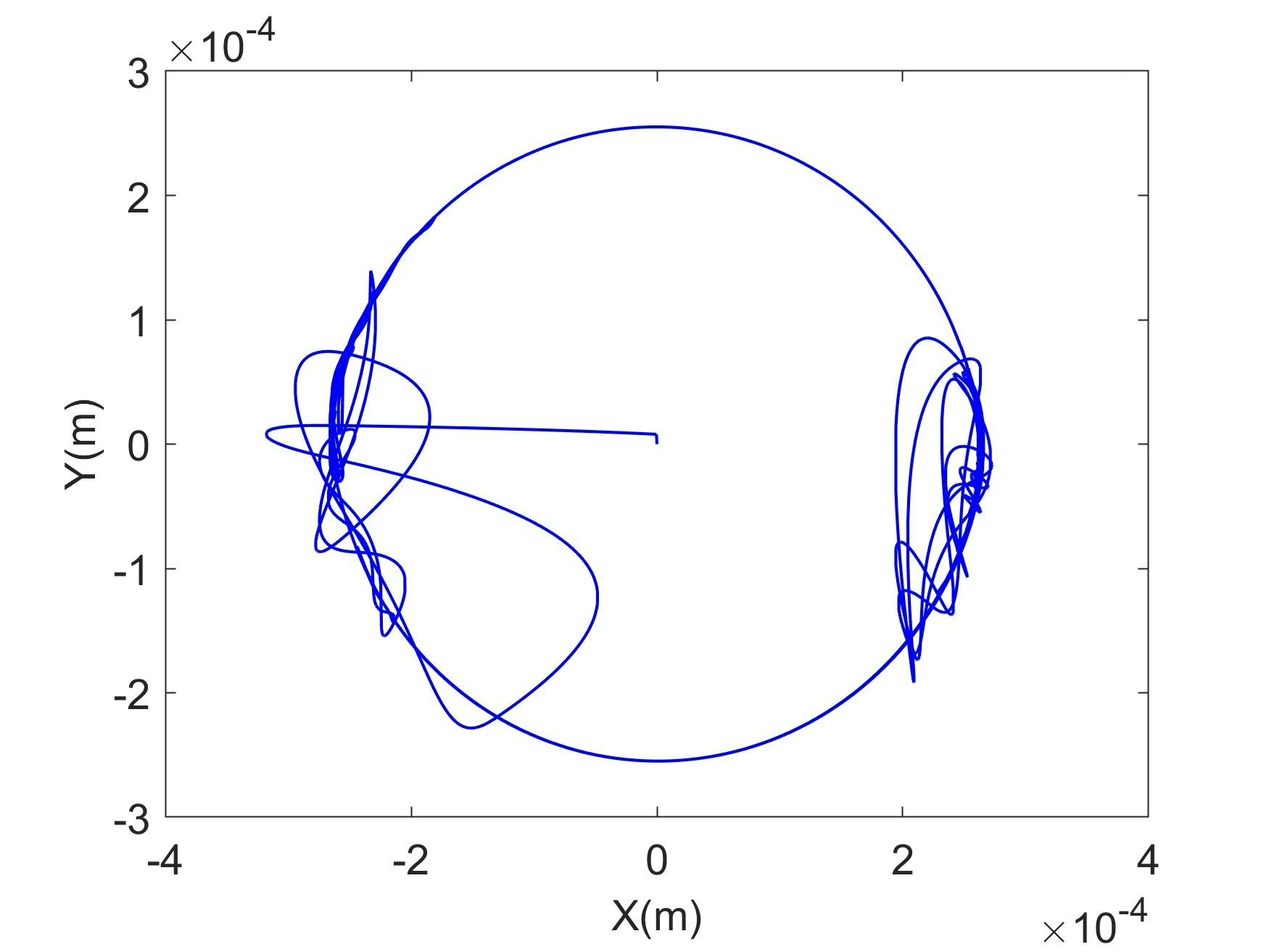
通过对比理想系统和含间隙系统的仿真结果,观察到三个典型现象:
- 加速度响应畸变
- 理想系统:光滑正弦曲线
- 含间隙系统:出现高频振荡(见图)
-
相位偏移
- 0.25mm间隙导致约3°相位滞后
- 计算公式:Δt = arcsin(c/L)/ω
-
能量耗散
- 每周期能量损失约0.8%
- 主要来源:接触阻尼和摩擦
4.2 参数敏感性研究
改变间隙值c得到的峰值加速度统计:
| 间隙(mm) | 加速度峰值(m/s²) | 增幅(%) |
|---|---|---|
| 0 (理想) | 12.3 | - |
| 0.1 | 14.7 | 19.5 |
| 0.25 | 18.2 | 48.0 |
| 0.5 | 22.4 | 82.1 |
工程建议:对于精密机构,间隙应控制在0.1mm以内。
5. 进阶开发指南
5.1 自定义接触力模型扩展
现有系统支持三种扩展方式:
- 修改
forcemodel.m中的力计算公式- 例如添加粘弹性项:
Fn += C*vn
- 例如添加粘弹性项:
- 替换摩擦模型
Cd.m- 例如采用Stribeck曲线
- 通过
user_force.dll接口接入外部模型
5.2 多间隙耦合分析
对于含多个间隙铰链的系统,需要注意:
- 接触力计算顺序不影响结果
- 建议采用稀疏矩阵存储雅可比矩阵
- 并行计算设置示例:
matlab复制parfor i = 1:numJoints F(:,i) = forcemodel(q(:,i), qp(:,i)); end
5.3 实验验证方案
我们采用的标定方法:
- 高速摄像机记录实际机构运动
- 激光测振仪采集加速度信号
- 参数反演流程:
- ① 固定K,辨识er
- ② 固定er,优化K
- ③ 循环①-②直到误差<5%
实测与仿真对比结果:
6. 常见问题解决方案
Q1:仿真出现数值发散
可能原因及排查步骤:
- 检查初始条件
- 确认无初始穿透:
delta = q(1) - q(2) - c > 0
- 确认无初始穿透:
- 降低首次仿真步长
- 设置
InitialStep=1e-6
- 设置
- 查看接触力输出
- 用
disp(Fn)确认力值合理
- 用
Q2:ADAMS联合仿真时通讯失败
典型错误处理:
- 版本兼容性
- MATLAB与ADAMS需同为32位或64位
- 路径设置
.dll文件路径不能含中文
- 函数签名
- 确保导出函数符合
__stdcall约定
- 确保导出函数符合
Q3:高频振荡处理技巧
三种滤波方案对比:
| 方法 | 优点 | 缺点 |
|---|---|---|
| 数值阻尼 | 不改变物理模型 | 可能掩盖真实动态 |
| 低通滤波 | 物理意义明确 | 引入相位滞后 |
| 接触刚度软化 | 符合实际材料特性 | 需要重新标定参数 |
个人推荐方案:在测量端添加20kHz低通滤波,既保留主要动态又不影响求解。