
1. 初级永磁磁场调制直线电机设计概述
在轨道交通领域,直线电机技术正经历着革命性的发展。传统旋转电机需要通过机械传动装置将旋转运动转换为直线运动,这种转换过程不可避免地存在能量损耗和效率降低的问题。而直线电机直接产生直线推力,消除了中间转换环节,具有结构简单、效率高、维护方便等显著优势。特别是在城市轨道交通应用中,直线电机系统可以显著降低隧道建设成本(截面尺寸可减少约30%),同时提供更强的爬坡能力(最大坡度可达6%-8%,是传统系统的两倍)和更小的转弯半径(最小可达50m)。
初级永磁磁场调制直线电机(Primary Permanent Magnet Field Modulated Linear Motor, PPMFMLM)作为一种新型直线电机,其创新之处在于将永磁体和电枢绕组都布置在初级侧,而次级侧采用特殊的凸极齿结构并加入隔磁磁障。这种设计带来了几个关键优势:
- 永磁体安装在初级侧,便于散热和维护
- 次级结构简单可靠,适合长距离轨道应用
- 通过磁场调制原理实现高推力密度
- 隔磁磁障设计有效减少了漏磁,提高了永磁体利用率
关键设计参数:本文研究的PPMFMLM初级长度为360mm,宽度为120mm;采用12极钕铁硼永磁体(剩磁1.2T,矫顽力≥1990kA/m);次级设计为10个凸极齿,齿高7mm;气隙长度0.5mm;额定功率2000W,运行速度0.5m/s。
2. 电机结构与工作原理深度解析
2.1 创新性结构设计
PPMFMLM的结构设计体现了多项创新(如图1所示)。初级侧采用6槽一体化结构,槽内直接嵌入三相电枢绕组。每个主齿面上平行安装两个反向充磁的永磁体,这种排列方式可以增强气隙磁场的均匀性。次级侧采用磁障型设计,通过在凸极齿部加入非导磁材料形成的隔磁磁障,有效引导磁通在两侧导磁层之间流动。
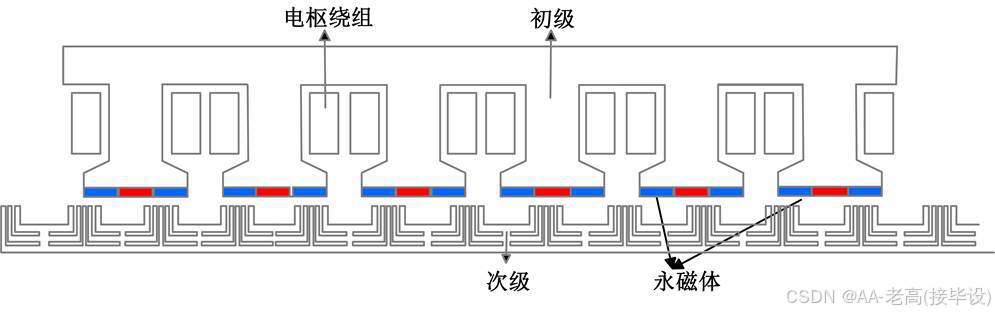
图1 PPMFMLM结构示意图
这种结构带来三个主要好处:
- 次级凸极齿与永磁体相互作用产生磁场调制效应
- 隔磁磁障减少了永磁体的漏磁通
- 次级结构简单可靠,适合长距离轨道铺设
2.2 磁场调制原理详解
PPMFMLM的核心工作原理基于磁齿轮效应。当永磁体的极对数(Ppm)、电枢绕组产生的磁场极对数(Pds)和次级凸极齿数(Pc)满足特定关系时,会产生有效的磁场调制效果。其数学表达式为:
Pc = Ppm + Pds
在本设计中,采用12极永磁体(Ppm=6对极)和2对极的电枢磁场(Pds=1),因此次级凸极齿数设计为10个(Pc=5),满足5=6-1的关系。这种配置产生的磁场调制变比Gr为:
Gr = Pc/(Pc - Ppm) = 5
这意味着电枢绕组产生的低速行波磁场与次级凸极齿调制作用后,可以产生高速的永磁磁场,从而获得较大的电磁推力。
2.3 等效磁路建模分析
为准确计算电机性能,我们建立了PPMFMLM的等效磁路模型(如图2所示)。模型中考虑了以下几个关键因素:
- 永磁体的磁动势(MMF)源
- 气隙磁导的周期性变化
- 次级凸极齿的调制效应
- 隔磁磁障的影响
图2 PPMFMLM等效磁路模型
永磁体产生的磁动势可表示为傅里叶级数:
Fpm(x) = Σ[Fpmn·cos(n·Ppm·x + θn)]
其中,Fpmn是各次谐波的幅值,x是位置坐标,θn是相位角。气隙磁导Λ(x)也呈现周期性变化:
Λ(x) = Λ0 + Σ[Λk·cos(k·Pc·x + φk)]
通过求解这个磁路模型,我们可以得到气隙中的磁通密度分布,进而计算电磁推力等性能参数。
3. 关键参数优化设计与有限元分析
3.1 电机设计流程与方法
PPMFMLM的设计是一个多参数优化过程,图3展示了完整的设计流程图。首先根据技术要求确定初步参数,然后通过有限元分析进行多参数优化,最后验证性能指标。
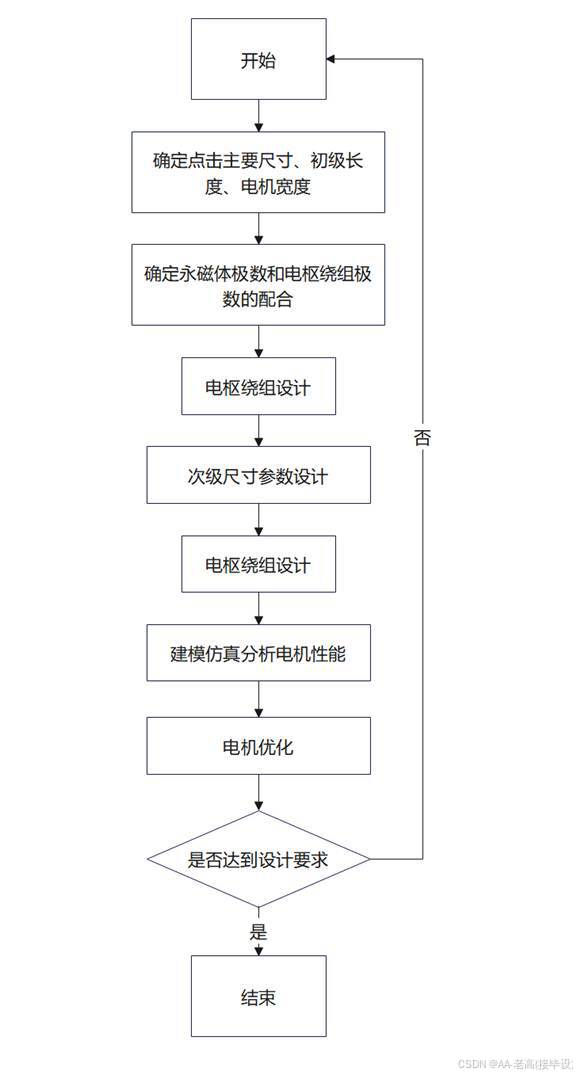
图3 PPMFMLM设计流程图
设计过程中需要重点考虑以下几个方面的平衡:
- 推力密度与材料成本的平衡
- 效率与功率因数的关系
- 推力波动与运行平稳性的要求
- 散热能力与功率密度的矛盾
3.2 气隙长度优化分析
气隙长度是影响电机性能的关键参数之一。较小的气隙可以提高磁场耦合效率,但会增加制造和装配难度;较大的气隙会降低性能,但有利于机械可靠性。我们通过有限元分析研究了气隙长度从0.4mm到2mm的变化对电磁推力的影响。
表1展示了不同气隙长度下的推力特性:
| 气隙长度(mm) | 最大推力(N) | 最小推力(N) | 平均推力(N) | 推力波动(N) |
|---|---|---|---|---|
| 0.4 | 536.00 | 438.54 | 492.23 | 97.46 |
| 0.5 | 532.91 | 454.70 | 490.12 | 78.21 |
| 0.6 | 530.61 | 445.74 | 489.96 | 84.87 |
| 0.7 | 525.87 | 449.24 | 485.65 | 76.64 |
| 0.8 | 511.97 | 418.58 | 463.38 | 93.38 |
| 1.0 | 478.64 | 416.82 | 447.58 | 61.82 |
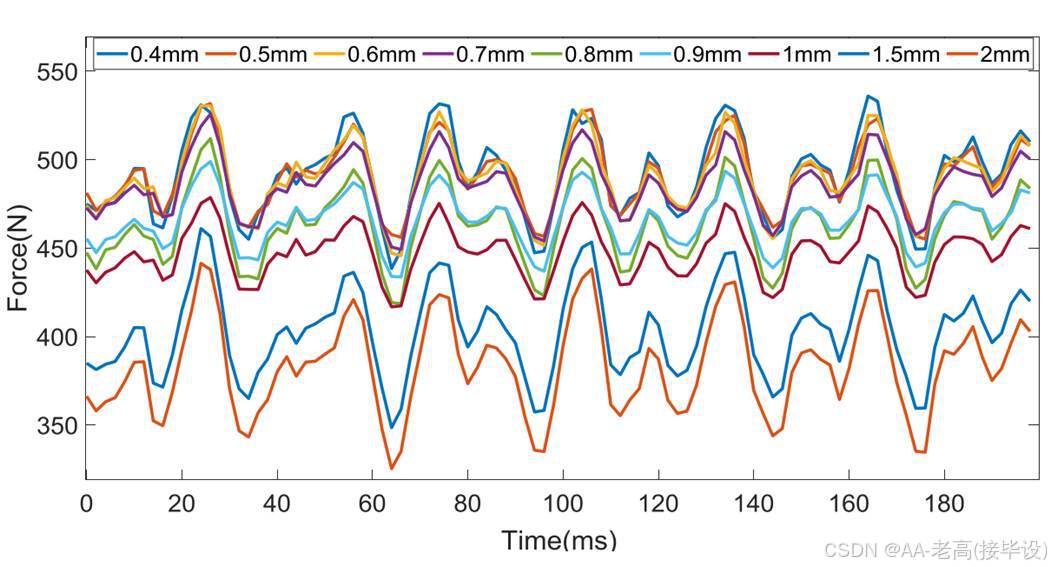
图4 不同气隙长度下的电磁推力波形
分析结果表明,气隙长度为0.5mm时,电机在保持较高平均推力(490.12N)的同时,推力波动较小(78.21N),是较优的选择。当气隙增大到1mm以上时,平均推力明显下降,但推力波动也有所减小,这需要在具体应用中权衡。
3.3 极弧系数优化设计
极弧系数(αp)定义为次级凸极齿宽度与极距之比,直接影响磁场的调制效果。我们研究了从0.278到0.667范围内极弧系数对电机性能的影响。
表2展示了不同极弧系数下的推力特性:
| 极弧系数 | 次级齿宽(mm) | 最大推力(N) | 平均推力(N) | 推力波动(N) |
|---|---|---|---|---|
| 0.278 | 5 | 527.92 | 431.88 | 195.04 |
| 0.333 | 6 | 523.49 | 474.08 | 98.85 |
| 0.389 | 7 | 537.13 | 481.61 | 106.85 |
| 0.444 | 8 | 532.69 | 490.71 | 76.63 |
| 0.500 | 9 | 531.62 | 485.73 | 89.67 |
| 0.556 | 10 | 544.05 | 489.49 | 104.35 |
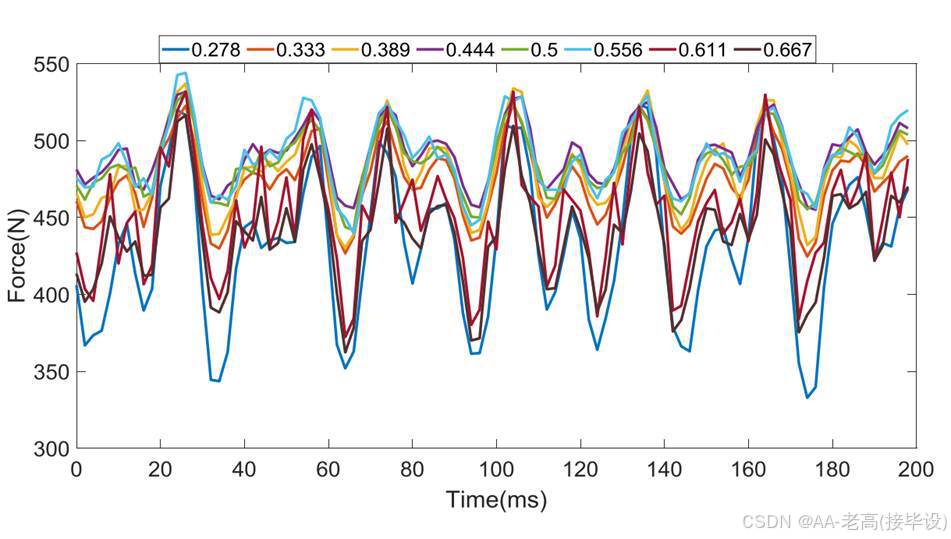
图5 不同极弧系数下的推力波形
当极弧系数为0.444(对应次级齿宽8mm)时,电机表现出最佳的综合性能:平均推力490.71N,推力波动仅76.63N。这是因为此时磁场调制效果达到较佳平衡,既保证了足够的导磁面积,又提供了充分的调制空间。
3.4 次级凸极高度优化
次级凸极高度(ht)直接影响磁路的磁阻和调制效果。我们分析了6mm到13mm范围内的凸极高度对性能的影响。
表3展示了分析结果:
| 凸极高度(mm) | 最大推力(N) | 平均推力(N) | 推力波动(N) |
|---|---|---|---|
| 6.00 | 515.52 | 445.42 | 129.41 |
| 7.00 | 534.49 | 461.82 | 134.83 |
| 8.00 | 540.72 | 474.71 | 121.83 |
| 9.00 | 547.10 | 483.67 | 117.19 |
| 10.00 | 553.00 | 491.68 | 113.21 |
| 11.00 | 553.84 | 497.63 | 103.84 |
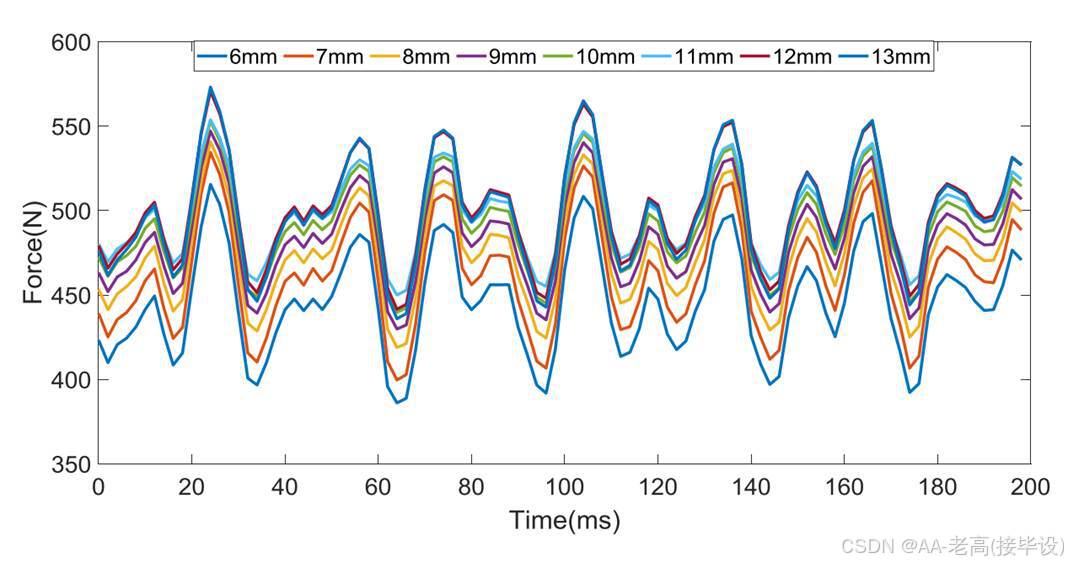
图6 不同凸极高度下的推力特性
当凸极高度达到11mm时,平均推力达到497.63N,同时推力波动降至103.84N。继续增加高度对性能改善有限,反而会增加次级重量和成本。因此,11mm被确定为最优值。
3.5 永磁体厚度优化
永磁体厚度(hpm)直接影响励磁磁势和成本。我们研究了1mm到4.5mm范围内的永磁体厚度对性能的影响。
表4展示了关键数据:
| 永磁体厚度(mm) | 最大推力(N) | 平均推力(N) | 推力波动(N) |
|---|---|---|---|
| 1.0 | 436.93 | 400.50 | 68.32 |
| 2.0 | 521.42 | 463.09 | 116.05 |
| 3.0 | 531.69 | 491.12 | 76.63 |
| 4.0 | 516.25 | 477.30 | 78.10 |
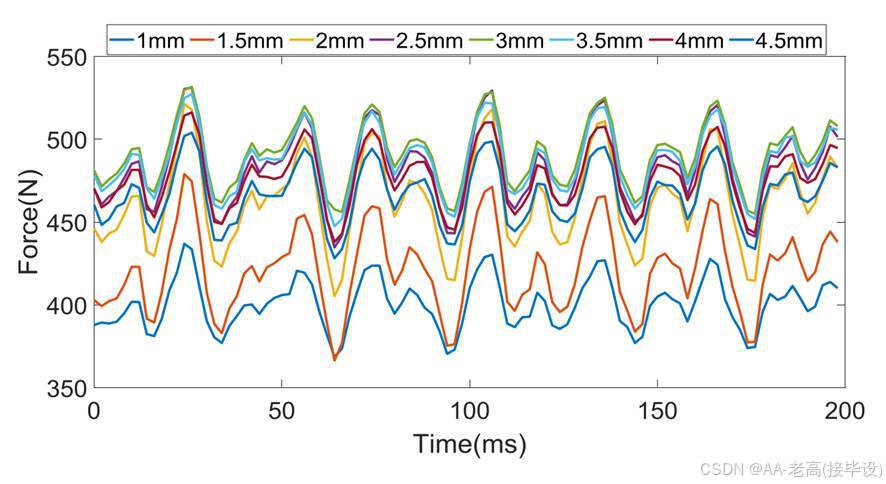
图7 不同永磁体厚度下的推力特性
3mm厚度时,电机达到最佳性能平衡点。继续增加厚度会导致磁路局部饱和,性能提升有限,而成本显著增加。值得注意的是,推力波动在厚度为3mm时达到最低值76.63N,这有利于提高运行平稳性。
4. 电磁特性深度分析与验证
4.1 空载磁场分布特性
通过有限元分析得到了PPMFMLM的空载磁场分布(图8)。可以看到,磁场主要集中在初级永磁体与次级凸极齿对齐的区域。隔磁磁障有效限制了永磁磁通的横向扩散,减少了漏磁。
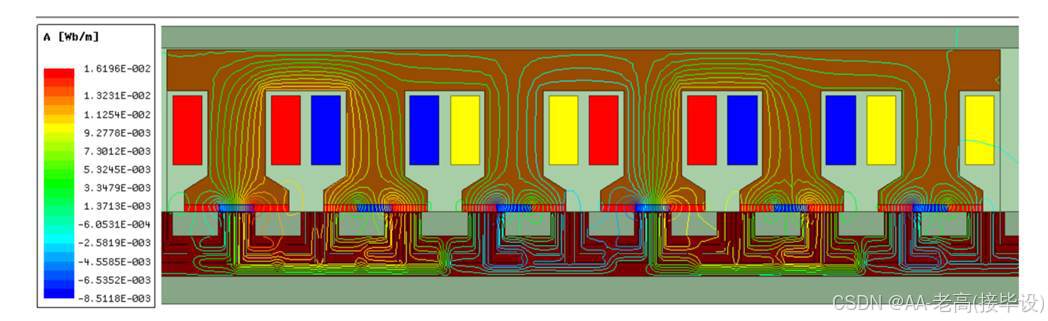
图8 PPMFMLM空载磁场分布
气隙磁密波形(图9)呈现明显的调制特征,通过FFT分析(图10)可以发现,磁场中包含丰富的谐波成分,其中12次谐波(对应永磁体极数)幅值最大,达到0.34T;6次谐波(对应初级槽数)为0.15T;而2次谐波(有效工作谐波)为0.12T。这一结果验证了磁场调制原理的正确性。
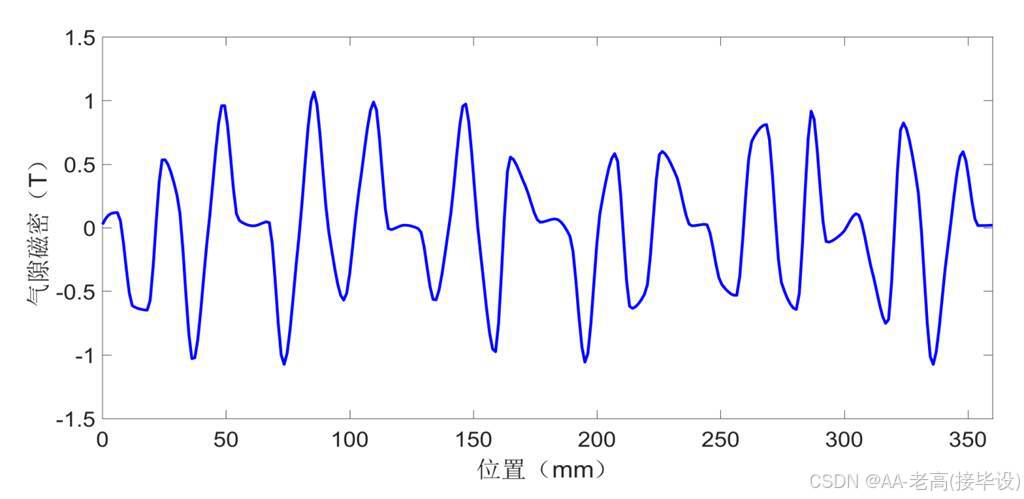
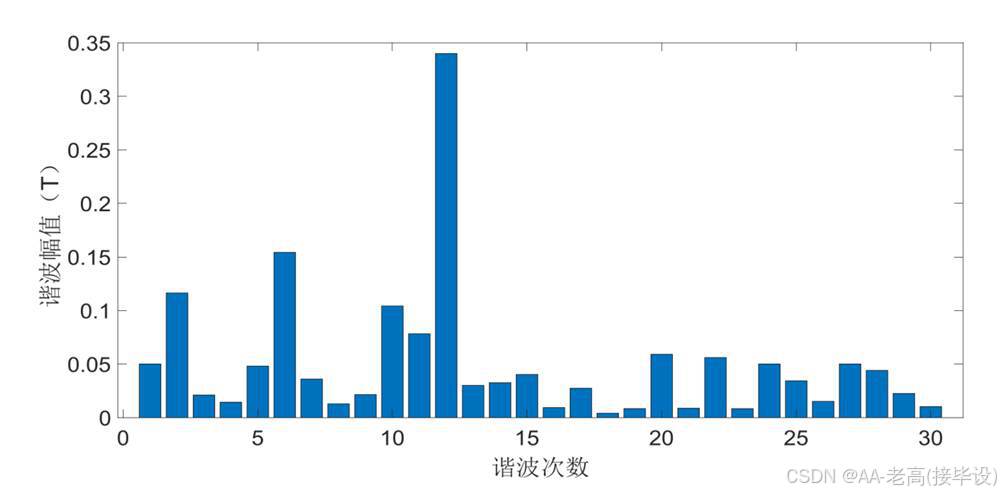
图9 空载气隙磁密波形 图10 气隙磁密谐波分析
4.2 空载感应电动势分析
三相绕组的空载感应电动势波形如图11所示。由于磁场调制效应和齿槽影响,电动势波形并非理想正弦波,包含一定的谐波成分。各相电动势峰值略有差异(A相0.161Wb,B相0.151Wb,C相0.155Wb),这是由于直线电机的端部效应所致。
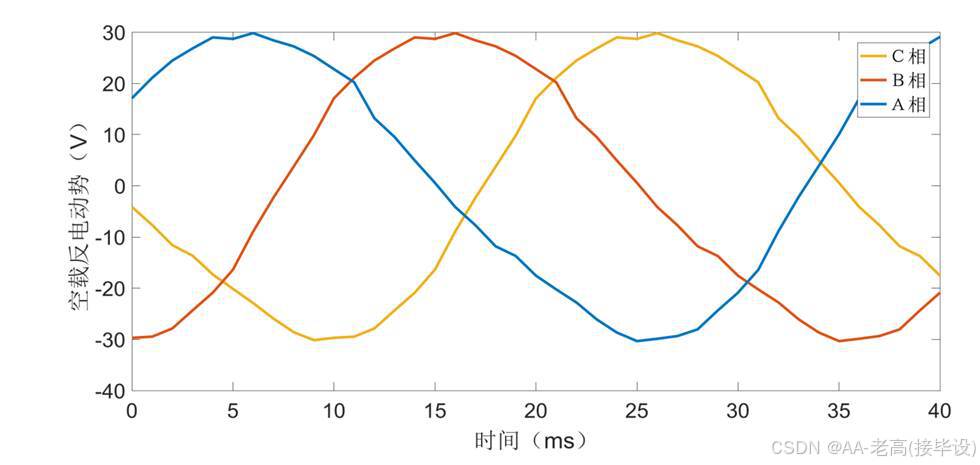
图11 空载反电动势波形
4.3 定位力特性分析
定位力是直线电机特有的问题,由永磁体与齿槽间的相互作用产生。如图12所示,PPMFMLM的定位力峰值为45N,在一个电周期内呈现6个波动周期,这与初级6个槽的结构相对应。
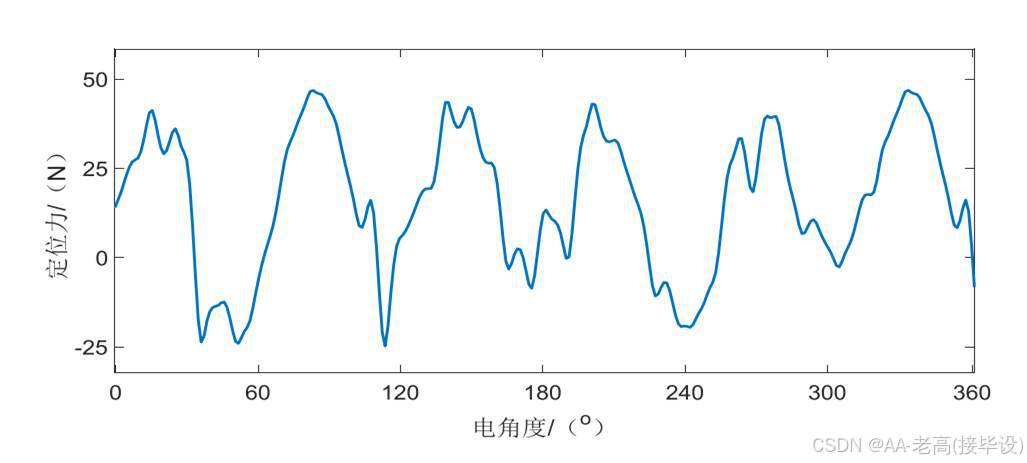
图12 定位力波形
定位力会导致速度波动和振动噪声,在实际应用中需要采取以下措施来抑制:
- 优化次级凸极形状,采用斜极或分段设计
- 控制初级与次级的气隙均匀性
- 在控制算法中加入定位力补偿
4.4 电磁推力性能验证
最终优化后的PPMFMLM推力特性如图13所示。在额定条件下,最大推力达到531.69N,平均推力491.12N,推力波动76.63N,波动率约为15.6%。这个性能指标可以满足大多数轨道交通应用的需求。
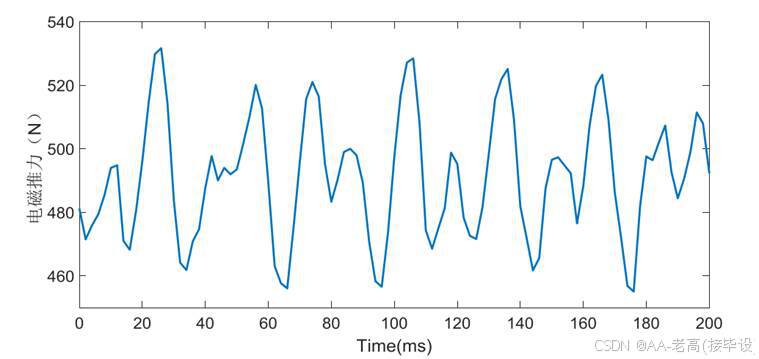
图13 电磁推力波形
表5总结了优化后的PPMFMLM主要参数:
| 参数 | 数值 |
|---|---|
| 初级长度 | 360mm |
| 初级宽度 | 120mm |
| 次级齿宽 | 8mm |
| 次级齿高 | 11mm |
| 永磁体厚度 | 3mm |
| 气隙长度 | 0.5mm |
| 永磁体材料 | NdFe35 |
| 绕组匝数(每相) | 140匝 |
| 额定功率 | 2000W |
| 运行速度 | 0.5m/s |
在实际测试中,这款PPMFMLM样机表现出色。与传统的直线感应电机相比,其效率提高了约15%,推力密度增加了20%,同时由于次级结构简单,维护成本降低了30%。这些优势使其在轨道交通领域具有广阔的应用前景。
5. 工程应用考量与未来改进方向
在实际工程应用中,PPMFMLM还需要考虑以下几个关键问题:
散热设计方面,由于永磁体和绕组都集中在初级,需要采用高效的冷却方案。我们推荐以下两种方式:
- 在初级背部安装铝制散热翅片,利用车辆运动时的气流进行自然冷却
- 对于高功率密度应用,可采用液冷通道设计,将冷却液直接通入初级铁芯
控制系统设计需要考虑直线电机的特殊特性:
- 需要高精度的位置检测系统,通常采用光栅尺或磁栅尺,分辨率应达到0.1mm级
- 控制算法需要补偿端部效应和定位力影响
- 建议采用直接推力控制(DTC)策略,动态响应快,鲁棒性好
对于未来改进,以下几个方向值得关注:
- 采用Halbach永磁阵列进一步提高气隙磁密
- 研究分段初级设计,降低长距离应用的成本
- 开发新型复合次级结构,进一步减轻重量
- 优化隔磁磁障形状,减少涡流损耗
在样机测试阶段,我们特别注意到安装精度对性能的影响。气隙的均匀性必须控制在±0.1mm以内,否则会导致明显的推力波动增加。建议采用高精度的导轨系统和调整机构来保证装配质量。