COMSOL激光抛光仿真:多物理场耦合建模实践

1. 激光抛光仿真模型概述
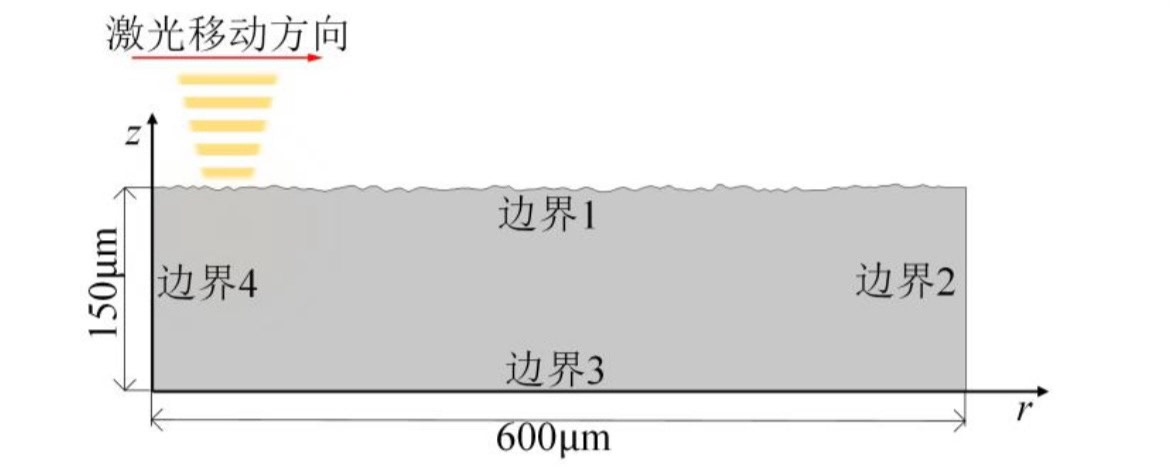
激光抛光作为一种非接触式表面处理技术,其核心在于通过精确控制激光能量在材料表面形成可控的熔池。这个熔池的动力学行为直接决定了最终的抛光质量。在COMSOL中构建这样一个多物理场耦合模型,需要同时考虑热传导、流体流动和动态网格三个关键要素。
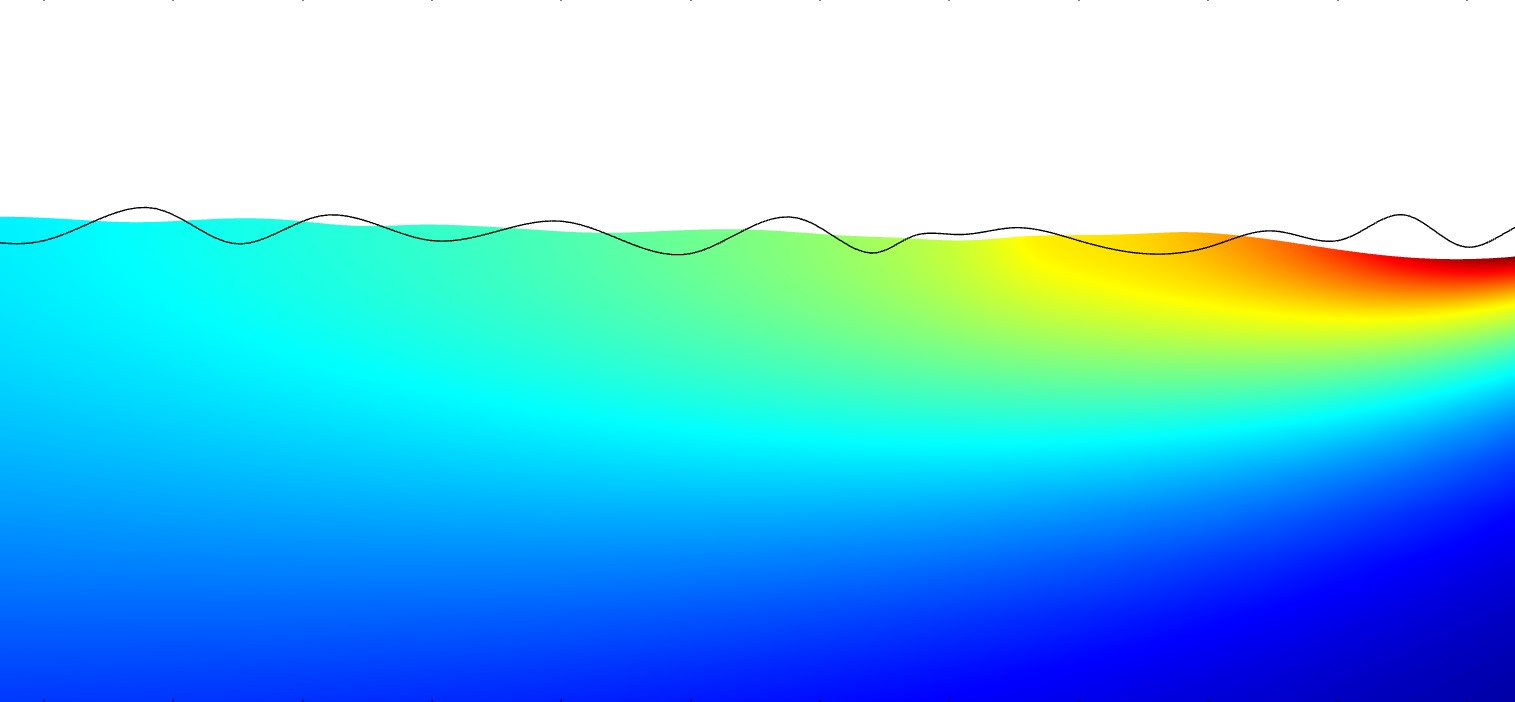
熔池边缘那些优美的波纹图案(如图1所示),实际上是表面张力与热毛细效应(马兰戈尼效应)相互博弈的结果。表面张力试图使熔池保持最小表面积,而温度梯度导致的马兰戈尼效应则驱动熔体从高温区流向低温区。这种复杂的相互作用使得熔池形状和流动模式呈现出独特的特征。
2. 模型构建的核心模块
2.1 固体传热模块配置
激光热源的建模是整个仿真的起点。我们采用移动高斯热源来模拟实际激光束的能量分布。这里的关键是正确定义热源的空间分布和时间演化:
matlab复制double amplitude = 500e3; // 热流密度峰值(W/m²)
double R = 0.2e-3; // 光斑半径(m)
double v = 0.5; // 扫描速度(m/s)
q_laser = amplitude * exp(-((X-v*t)^2 + Y^2)/R^2);
这个表达式中的(X-v*t)项实现了热源的连续移动,其中t是时间变量。值得注意的是,热源峰值功率的选择需要根据材料属性(如熔点、热导率)进行合理设置,过高的功率会导致不现实的深熔池,而过低则无法形成有效抛光。
2.2 层流模块设置
熔融金属的流动行为由层流模块描述。这里需要特别注意:
- 材料属性随温度的变化:特别是粘度,它在熔点附近会发生剧烈变化
- 自由表面的处理:需要正确定义熔池与空气的界面
- 浮力效应:在较大熔池中需要考虑自然对流的影响
对于典型的金属材料,粘度可以表示为:
matlab复制mu = mu0 * exp(Ea/(Rg*T)); // Arrhenius型粘度公式
其中mu0是参考粘度,Ea是活化能,Rg是气体常数。
2.3 动网格技术实现
动网格(ALE)技术是处理移动热源的关键。我们采用双曲正切函数来实现网格位移的平滑过渡:
matlab复制d = d_max * 0.5*(1-tanh((r-r0)/s));
其中:
d_max是最大位移量r是到激光中心的距离r0是过渡区起始半径s控制过渡的陡峭程度
这种过渡方式比线性过渡更稳定,因为它避免了位移场的突变。在实际操作中,建议将过渡区设置为光斑半径的2-3倍。
3. 表面效应的高级建模
3.1 表面张力建模
表面张力在熔池行为中扮演着双重角色:一方面它使熔池收缩,另一方面它的温度依赖性(马兰戈尼效应)驱动表面流动。完整的表面应力表达式为:
matlab复制sigma = 1.2; // 表面张力系数(N/m)
dSigma_dT = -0.0005; // 温度系数(N/m·K)
F_marangoni = (sigma + dSigma_dT*(T-T_ref)) * curvature + dSigma_dT * gradT_tangent;
其中gradT_tangent是表面温度梯度的切向分量,在COMSOL中可以通过以下方式提取:
matlab复制gradT_tangent = nx*Ty - ny*Tx; // n是表面法向量
3.2 马兰戈尼效应的实现
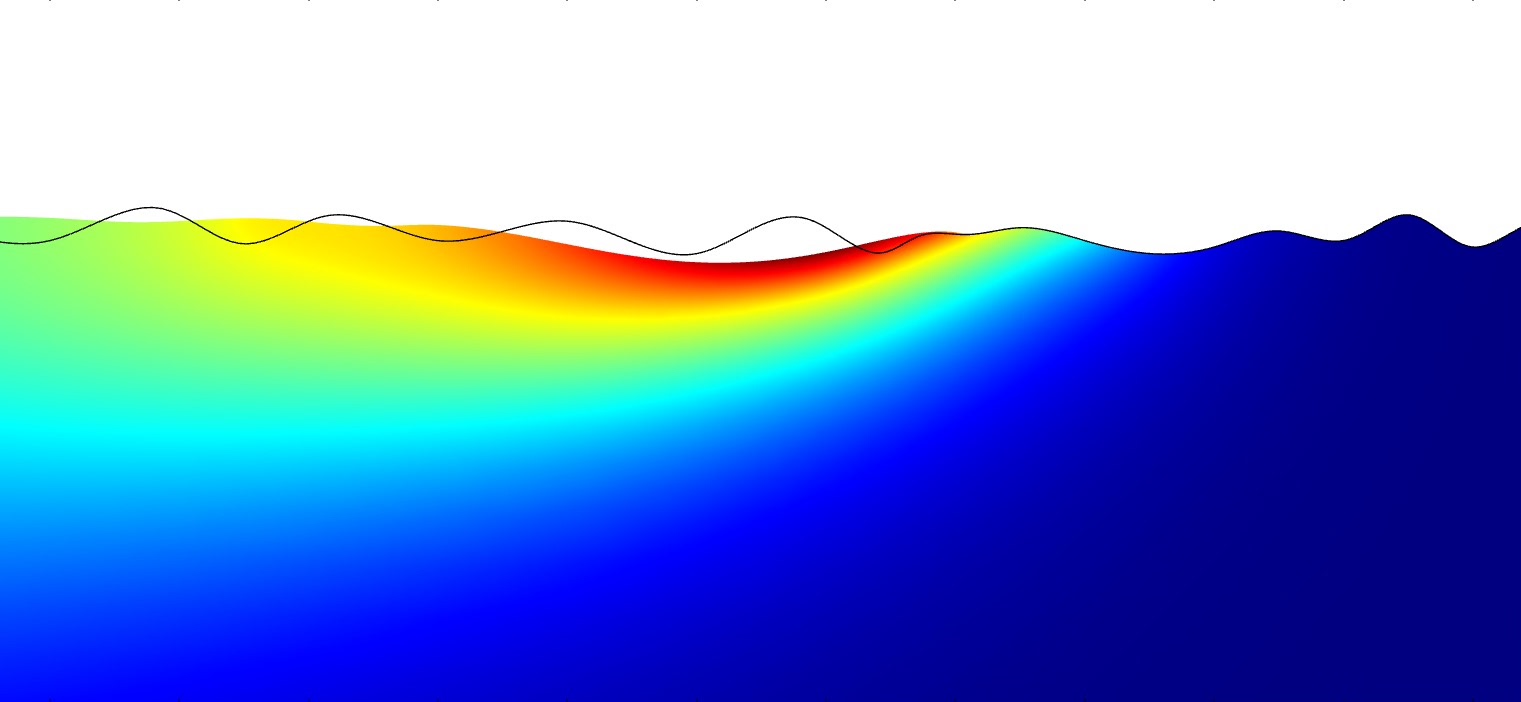
马兰戈尼效应会导致熔池表面形成特征性的涡流结构(如图2所示)。这种流动源于表面张力随温度的变化:高温区表面张力较低,流体被从高温区"拉"向低温区。
在COMSOL中实现这一效应时,需要注意:
- 确保温度系数
dSigma_dT的符号正确(对大多数金属为负值) - 表面梯度的计算要准确,特别是在曲面情况下
- 适当限制最大表面速度以避免数值不稳定
4. 求解策略与技巧
4.1 分步求解方法
成功的多物理场耦合仿真需要精心设计的求解策略:
- 稳态预热阶段:先只激活传热模块,计算初始温度场
- 延迟激活流动:在瞬态求解开始10秒后再激活层流模块
- 渐进式网格移动:初始阶段限制网格位移量,逐步增加
这种"节奏感"设置可以显著提高求解稳定性。图3展示了典型的残差曲线,可以看到流动模块激活时的瞬态波动,以及动网格的稳定作用。
4.2 参数选择建议
基于大量仿真实践,我们总结出以下经验参数:
| 参数 | 推荐值范围 | 影响规律 |
|---|---|---|
| 激光功率密度 | 300-800 kW/m² | 过高导致过度熔透 |
| 扫描速度 | 0.3-1.0 m/s | 速度低则熔池大 |
| 表面张力系数 | 0.8-1.5 N/m | 值大则熔池浅 |
| 温度系数 | -0.3~-0.7 mN/m·K | 绝对值大则涡流强 |
5. 常见问题与解决方案
5.1 网格畸变问题
动网格仿真中最常见的问题是网格畸变。解决方法包括:
- 增加过渡区范围
- 使用更平滑的位移函数(如双曲正切)
- 设置合理的网格重构阈值
- 局部细化预期变形区域的网格
5.2 求解发散处理
当求解出现发散时,可以尝试:
- 减小时间步长
- 降低非线性求解器的阻尼因子
- 分阶段激活物理场
- 使用更平缓的初始条件
5.3 熔池形态异常
如果熔池形状不符合预期,检查:
- 热源定义是否正确(特别是单位)
- 材料相变潜热是否考虑
- 表面边界条件设置
- 环境热损失是否合理
6. 实际应用中的参数优化
激光抛光效果与工艺参数之间存在复杂的非线性关系。通过参数扫描可以发现一些反直觉的现象,例如:
- 表面张力效应:当表面张力系数超过1.5N/m后,熔池深度变化趋于平缓
- 功率-速度匹配:存在最优的功率-速度组合,使表面粗糙度最小
- 马兰戈尼效应:适度的温度系数(-0.4~-0.6)有利于获得平滑表面
这些发现对实际工艺优化具有重要指导意义。例如,不应盲目提高激光功率,而应该寻找表面张力与热输入的平衡点。
7. 模型验证与实验对比
为确保仿真结果的可靠性,我们建议:
- 熔池尺寸对比:通过高速摄像测量实际熔池长宽,与仿真结果比较
- 表面形貌分析:使用白光干涉仪测量抛光后表面粗糙度
- 温度场验证:采用红外热像仪获取表面温度分布
典型的验证标准是熔池长度误差控制在15%以内,表面波纹预测趋势与实验一致。
8. 高级应用扩展
本模型框架可以进一步扩展用于:
- 多道搭接抛光:研究相邻扫描道之间的热积累效应
- 异种材料抛光:通过修改材料属性研究不同金属的抛光行为
- 脉冲激光模式:将连续热源改为脉冲式,模拟实际工业激光器
这些扩展只需在现有模型基础上进行适当修改,不需要重建整个多物理场耦合框架。
在实际操作中,我发现初始网格质量对计算稳定性影响极大。一个实用的技巧是在激光路径区域预先设置较密的网格,并在求解过程中监控最大网格畸变率。当发现局部网格质量恶化时,可以暂停计算,导出当前网格进行修复,然后继续求解。这种方法虽然略显繁琐,但往往能挽救一个即将发散的计算。