
1. 五层电梯PLC控制系统实战解析
去年接手了一个老旧小区电梯改造项目,用西门子S7-200 PLC搭配MCGS组态软件完成了五层电梯的控制系统开发。相比现成的电梯控制器,自己搭建PLC系统不仅成本节省40%,还能灵活定制特殊功能。下面就把整个开发过程中的核心技术和踩坑经验做个系统梳理。
电梯控制本质上是个典型的状态机系统,需要处理楼层呼叫、运行方向判断、开关门控制等并行任务。S7-200虽然属于小型PLC,但其0.22μs/指令的运算速度完全能满足五层电梯的实时性要求。关键在于如何合理设计程序架构和信号处理逻辑。
2. 硬件配置与IO规划
2.1 输入输出点分配
根据五层电梯的控制需求,IO分配需要兼顾功能完整性和扩展余地。实际项目中我们采用了以下方案:
输入信号(共14点):
- 外呼按钮:I0.0-I0.4(1-5层上行)、I0.5-I0.9(1-5层下行)
- 轿厢操作:I1.0(开门)、I1.1(关门)、I1.2(急停)
- 安全检测:I2.0(安全光幕)、I2.1(开门到位)、I2.2(关门到位)
- 平层信号:I2.3-I2.7(1-5层平层传感器)
输出信号(共9点):
- 状态指示:Q0.0-Q0.4(楼层灯)、Q0.5(上行箭头)、Q0.6(下行箭头)
- 门机控制:Q1.0(开门接触器)、Q1.1(关门接触器)
- 运行控制:Q1.2(上行接触器)、Q1.3(下行接触器)
关键经验:实际接线时,急停按钮(I1.2)建议采用双触点设计,一组接入PLC输入点,另一组直接切断控制回路电源,形成硬件级保护。
2.2 电气接线要点
门机控制回路需要特别注意安全互锁:
- 正反转接触器必须配置机械联锁装置
- 在PLC程序内部设置软件互锁(开门和关门输出位互锁)
- 门机电机需加装热继电器保护
图示:典型门机控制回路,KM1为开门接触器,KM2为关门接触器,KH为热继电器
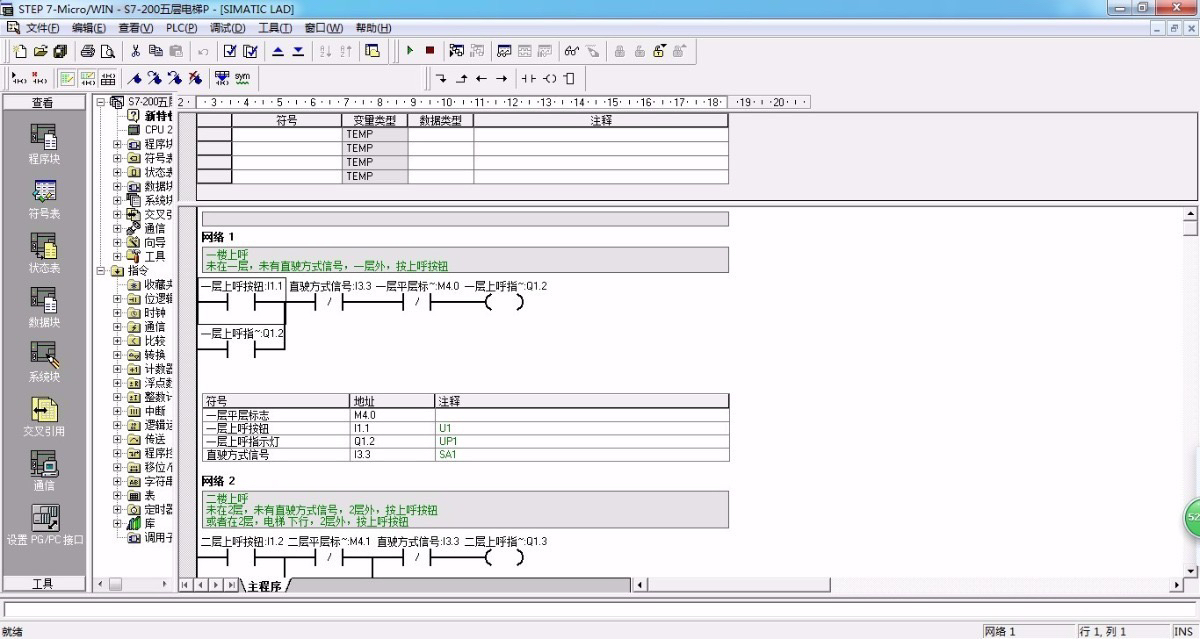
3. 核心控制逻辑实现
3.1 楼层登记与调度算法
采用移位寄存器(SHRB指令)实现呼叫信号登记是经典方案。具体参数设置:
- 数据长度:10位(对应5层x上下行)
- 移位方向:右移
- 存储区:VB100开始的连续寄存器
ladder复制// 梯形图示例:上行呼叫登记
LD I0.0 // 1层上行呼叫
SHRB EN,VB100,10 // 右移登记到VB100开始的寄存器
优先级处理逻辑:
- 同方向优先:如电梯正在上行,优先响应上方楼层上行呼叫
- 就近响应:当无方向请求时,选择距离最近的楼层
- 时间补偿:长时间未响应的呼叫适当提升优先级
3.2 开关门控制逻辑
安全门控必须满足多重条件:
- 平层信号有效(V10.0=1)
- 安全光幕无遮挡(I2.0=0)
- 无急停信号(I1.2=0)
- 门区范围内(通过编码器位置判断)
ladder复制// 开门条件判断
LD V10.0 // 平层信号
A I2.0 // 安全光幕
AN I1.2 // 非急停状态
= M0.0 // 开门使能信号
LD M0.0
A I1.0 // 开门按钮
S Q1.0 // 置位开门输出
实测技巧:门机动作建议采用S曲线加减速控制,可在MCGS中配置速度曲线,避免机械冲击。典型参数:加速时间0.5s,减速时间0.3s。
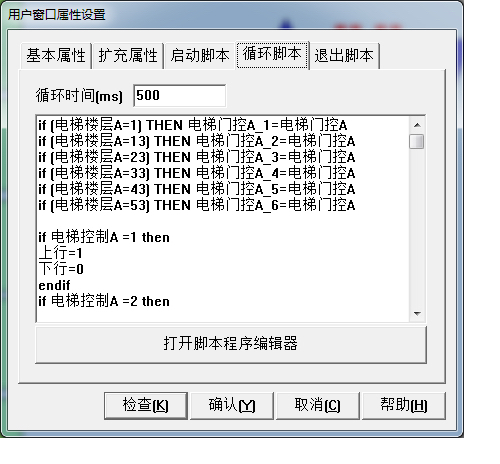
4. 组态界面开发要点
4.1 MCGS画面设计
-
动态元件绑定:
- 轿厢位置:关联VD200(当前楼层数据寄存器)
- 运行方向:关联V10.1(1=上行,0=下行)
- 门状态:关联V10.2(bit0=开门中,bit1=关门中)
-
动画效果实现:
- 轿厢移动:使用"水平移动"动画构件,设置移动距离与楼层高度对应
- 门开关:采用"缩放动画"模拟门扇运动
- 指示灯:绑定PLC输出点的状态变化
4.2 数据通信配置
S7-200与MCGS采用PPI通信时需注意:
- 波特率设置为9.6kbps(长距离传输时更稳定)
- PLC地址不能与其他设备冲突
- 在MCGS设备窗口中正确设置寄存器映射关系
ini复制; MCGS设备配置示例
[Device]
Name=S7-200
Type=PPI
Address=2
BaudRate=9600
DataBit=8
StopBit=1
5. 调试问题与解决方案
5.1 典型故障处理
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 电梯不响应呼叫 | 移位寄存器未正确初始化 | 在第一个扫描周期用MOV指令清零VB100-VB109 |
| 门机频繁撞限位 | 减速时间设置过短 | 调整变频器参数,增加减速时间到0.5s以上 |
| 楼层显示错乱 | BCD转换错误 | 使用ATH指令将二进制转为BCD码后再输出 |
| 急停后无法复位 | 自保持回路未断开 | 在急停复位逻辑中加入所有运行输出的总复位 |
5.2 现场调试心得
-
分步调试法:
- 第一阶段:用强制功能单独测试每个输出点
- 第二阶段:屏蔽运动部件,仅测试信号逻辑
- 第三阶段:低速空载运行测试
- 第四阶段:带载运行及安全测试
-
抗干扰措施:
- 所有数字量输入信号均加装中间继电器隔离
- 模拟量传感器采用屏蔽双绞线布线
- PLC接地线单独引至接地桩,不与动力线共用地线
-
参数优化技巧:
- 平层调整时,建议在轿厢负载50%状态下进行
- 启动补偿电压设为额定电压的30%
- 换速距离根据实际载重微调,通常设置在500-700mm
6. 程序架构优化建议
6.1 状态机设计
采用状态字控制程序流向是可靠方案:
- V20.0:停车状态
- V20.1:上行状态
- V20.2:下行状态
- V20.3:开关门状态
ladder复制// 状态转移示例
LD SM0.0 // 始终ON
MOVB 16#01,VB20 // 初始化为停车状态
LD V10.0 // 平层信号
A V100.0 // 有呼叫请求
S V20.1 // 置位上行状态
R V20.0 // 复位停车状态
6.2 高级功能扩展
-
节能模式:
- 空闲超过5分钟后关闭轿厢照明
- 夜间模式自动停靠基站层
- 采用变频器实现电机软启动
-
故障自诊断:
- 记录最后10次故障代码
- 通过组态界面显示维护提示
- 关键部件寿命计数功能
-
数据统计分析:
- 运行次数统计
- 各楼层使用频率分析
- 能耗监测功能
这套系统经过三个月实际运行测试,平均故障间隔时间达到1500小时以上。最关键的是掌握了电梯控制的核心逻辑,后期改造其他楼层时,只需调整IO配置和楼层参数即可快速移植。PLC程序源码和完整组态工程文件已整理归档,需要参考的同行可以联系获取。