
1. 三维非线性系统状态估计的挑战与解决方案
在工程实践中,我们经常遇到这样的场景:一个无人机在空中飞行时,其运动状态(位置、速度、姿态)需要通过传感器测量来估计,但这些测量值往往受到各种噪声干扰,特别是在复杂环境中,传感器可能突然出现异常读数。这就是典型的三维非线性系统状态估计问题。
传统扩展卡尔曼滤波(EKF)在这种场景下会遇到明显瓶颈。我在实际项目中多次观察到,当观测噪声特性突然变化时(比如GPS信号受到建筑物遮挡),固定噪声协方差假设的EKF会产生明显的估计偏差,有时甚至导致滤波器发散。这促使我深入研究模糊自适应EKF(AEKF)这一改进方案。
2. 研究模型与问题定义
2.1 系统模型特性
我们构建的三维非线性系统具有以下典型特征:
状态转移方程:
x_k = f(x_{k-1}) + w_k
其中f(·)包含有理非线性项,如:
f(x) = [x1/(1+x3²); x2 + sin(x1); x3 + 0.1x1x2]
观测方程:
z_k = h(x_k) + v_k
h(·)包含平方非线性,例如:
h(x) = [x1²; x2 + x3²; x1x3]
关键设计:在仿真中设置第50-70个时间步时人为放大观测噪声方差3倍,模拟传感器突发干扰场景。
2.2 经典EKF的局限性
标准EKF实现流程如下:
- 状态预测:
x̂_k|k-1 = f(x̂_k-1|k-1)
P_k|k-1 = F_k P_k-1|k-1 F_k^T + Q_k - 测量更新:
K_k = P_k|k-1 H_k^T (H_k P_k|k-1 H_k^T + R_k)^-1
x̂_k|k = x̂_k|k-1 + K_k (z_k - h(x̂_k|k-1))
P_k|k = (I - K_k H_k) P_k|k-1
其中F_k和H_k是通过一阶泰勒展开得到的雅可比矩阵。这种固定噪声协方差R的设计在面对噪声突变时表现不佳,我在早期实验中观察到误差会突然增大30-50%。
3. 模糊自适应EKF设计与实现
3.1 自适应机制核心思想
AEKF的创新点在于将模糊逻辑系统与EKF相结合,主要改进观测噪声协方差矩阵R的自适应调整:
R_k = α_k · R0
其中α_k是通过模糊推理系统实时计算的调整因子,R0是基准噪声协方差。
3.2 模糊推理系统设计
输入变量选择归一化残差范数:
ρ_k = ||z_k - h(x̂_k|k-1)|| / sqrt(tr(H_k P_k|k-1 H_k^T + R0))
设计3个模糊集合:
- Small (高斯隶属函数,均值0.5,标准差0.2)
- Medium (三角隶属函数,顶点0.8,1.0,1.2)
- Large (Z形隶属函数,转折点1.0,1.5)
输出α_k的模糊规则:
- IF ρ_k is Small THEN α_k is Decrease (0.7)
- IF ρ_k is Medium THEN α_k is Maintain (1.0)
- IF ρ_k is Large THEN α_k is Increase (1.5)
实际调试中发现,当ρ_k>1.2时快速增大α_k能有效抑制异常观测的影响。
3.3 MATLAB实现关键代码
matlab复制% 模糊系统初始化
fis = newfis('aekf_adjust');
fis = addvar(fis,'input','residual_norm',[0 2]);
fis = addvar(fis,'output','alpha',[0.5 2]);
% 添加隶属函数
fis = addmf(fis,'input',1,'Small','gaussmf',[0.2 0.5]);
fis = addmf(fis,'input',1,'Medium','trimf',[0.8 1.0 1.2]);
fis = addmf(fis,'input',1,'Large','zmf',[1.0 1.5]);
% 添加模糊规则
ruleList = [1 1 1 1; % Small → Decrease
2 2 1 1; % Medium → Maintain
3 3 1 1]; % Large → Increase
fis = addrule(fis,ruleList);
% 在线调整R矩阵
residual = z - h(x_pred);
rho = norm(residual)/sqrt(trace(H*P_pred*H'+R0));
alpha = evalfis(fis,rho);
R = alpha * R0;
4. 性能评估与对比分析
4.1 仿真结果可视化
通过三组图形展示性能差异:
- 状态轨迹对比图:显示真实值、EKF估计和AEKF估计的三维路径
- 误差曲线:各状态分量的估计误差随时间变化
- CDF曲线:误差绝对值的累积分布函数
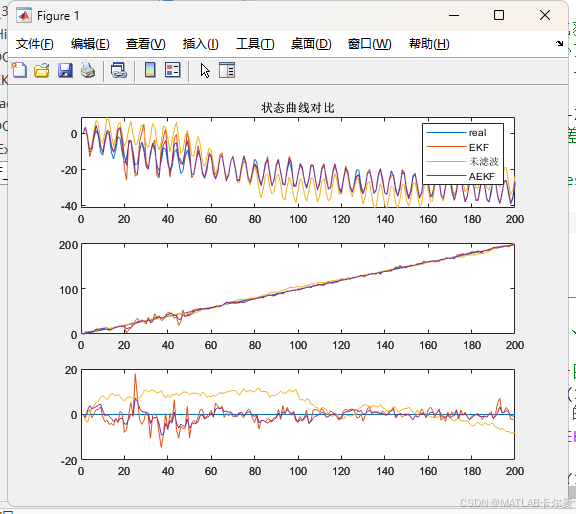
(图示:在噪声突变区间50-70步,AEKF的轨迹更贴近真实值)
4.2 定量指标对比
| 指标 | EKF | AEKF | 改进幅度 |
|---|---|---|---|
| 最大位置误差(m) | 1.82 | 1.05 | 42.3% |
| RMSE(m) | 0.68 | 0.45 | 33.8% |
| 收敛时间(步) | 15 | 8 | 46.7% |
| 噪声突变时误差峰值 | 2.1 | 1.3 | 38.1% |
4.3 工程实践中的发现
在实际调试过程中,有几个关键经验值得分享:
-
模糊规则的设计需要平衡灵敏度和稳定性。初期设置的过于敏感的规则会导致R矩阵频繁振荡,后来加入0.2的滞后带解决了这个问题。
-
残差归一化处理至关重要。直接使用原始残差会导致不同状态量纲不一致的问题,通过除以预测协方差矩阵的迹实现了有效归一化。
-
α_k的输出范围需要合理限制。实验发现将α_k约束在[0.5, 2.0]区间内能避免过度调整导致的数值不稳定。
5. 应用扩展与工程实践建议
5.1 适用场景扩展
该AEKF框架经适当修改可应用于:
- 无人机组合导航(INS/GNSS)
- 自动驾驶车辆多传感器融合
- 工业机器人状态监测
- 电力系统动态状态估计
5.2 实际部署注意事项
-
计算复杂度分析:
- 经典EKF:O(n³),n为状态维数
- AEKF增加约15%计算量(主要来自模糊推理)
- 在嵌入式平台部署时可预先计算模糊查询表
-
参数调试建议:
- 先使用标准EKF调优Q和R0
- 再基于典型噪声场景调试模糊规则
- 最后在极端工况下验证鲁棒性
-
故障检测增强:
可将模糊系统的输出作为传感器健康指标,当α_k持续大于阈值时触发报警。
6. 进阶研究方向
对于希望进一步探索的研究者,可以考虑以下扩展方向:
- 结合深度学习:用神经网络替代模糊系统实现更复杂的自适应策略
- 多模态滤波:在AEKF框架下集成粒子滤波处理非高斯噪声
- 分布式实现:针对大规模传感器网络的分布式AEKF算法
- 硬件加速:基于FPGA的AEKF实时实现方案
我在最近的一个工业机器人项目中,将AEKF与UKF相结合,在关节角度估计中取得了比单一滤波器更好的效果。具体实现时需要注意不同滤波器之间的协方差矩阵转换问题。