基于IMM-PF算法的机动目标三维跟踪优化方案

1. 项目概述
在三维空间目标跟踪领域,机动目标的运动模式切换一直是算法设计的难点。传统单一运动模型(如匀速模型或转弯模型)难以应对复杂多变的实际场景。我在最近的一个无人机跟踪项目中就深刻体会到了这一点——当目标突然从直线飞行转为盘旋时,单一模型的跟踪误差会急剧增大。
针对这个问题,我开发了一套基于交互式多模型(IMM)和粒子滤波(PF)的融合算法。这个方案最大的特点是:
- 同时维护CV(匀速直线)和CT(匀速转弯)两个运动模型
- 通过IMM机制动态调整模型权重
- 利用粒子滤波处理非线性观测问题
实测表明,这套方案在600步的仿真测试中,相比单一模型能将位置跟踪误差降低20-30%,特别是在运动模式切换的过渡阶段(如第151步和271步)表现尤为突出。
2. 核心算法设计
2.1 状态空间建模
目标的运动状态用6维向量表示:
code复制x = [x位置, x速度, y位置, y速度, z位置, z速度]^T
这种表示方法既包含了空间位置信息,也包含了运动速度信息,为后续的运动预测提供了完整的状态描述。在实际编码时,我特别注意到:
- 位置单位:米
- 速度单位:米/秒
- 采样间隔T设为1秒
2.2 双运动模型设计
2.2.1 CV模型(匀速直线模型)
matlab复制fCV = @(x, w) [x(1) + T*x(2) + T^2/2*w(1);
x(2) + T*w(1);
x(3) + T*x(4) + T^2/2*w(2);
x(4) + T*w(2);
x(5) + T*x(6) + T^2/2*w(3);
x(6) + T*w(3)];
这个模型假设目标在三个坐标轴上都做匀速直线运动,过程噪声w~N(0,Q1)用来模拟实际运动中的微小扰动。
2.2.2 CT模型(匀速转弯模型)
matlab复制w_ct = 0.1; % 固定角速度
fCT = @(x, w) [x(1) + sin(w_ct*T)/w_ct*x(2) - (1-cos(w_ct*T))/w_ct*x(4) + T^2/2*w(1);
cos(w_ct*T)*x(2) - sin(w_ct*T)*x(4) + T*w(1);
(1-cos(w_ct*T))/w_ct*x(2) + x(3) + sin(w_ct*T)/w_ct*x(4) + T^2/2*w(2);
sin(w_ct*T)*x(2) + cos(w_ct*T)*x(4) + T*w(2);
x(5) + T*x(6) + T^2/2*w(3);
x(6) + T*w(3)];
CT模型的特点是:
- XY平面做圆周运动(角速度w_ct=0.1rad/s)
- Z轴保持匀速运动
- 过程噪声w~N(0,Q2)
实际调试中发现,角速度w_ct的设置很关键:值太大会导致转弯半径过小,值太小则转弯不明显。经过多次试验,0.1rad/s是个比较折中的选择。
3. IMM-PF算法实现
3.1 整体流程框架
算法每次迭代包含四个关键步骤:
- 模型交互混合
- 粒子滤波预测更新
- 模型概率更新
- 状态估计融合
3.2 关键技术细节
3.2.1 粒子初始化
matlab复制% 初始化CV模型粒子
particles_cv = repmat(x0,1,Np) + randn(6,Np)*sqrtm(P0);
% 初始化CT模型粒子
particles_ct = repmat(x0,1,Np) + randn(6,Np)*sqrtm(P0);
这里采用高斯分布初始化粒子群,协方差矩阵P0需要合理设置。实践中发现:
- P0对角线元素设为[10,1,10,1,5,0.5]效果较好
- 粒子数Np=2000在精度和效率间取得了平衡
3.2.2 重采样策略
采用系统重采样(Systematic Resampling)方法,当有效粒子数Neff < Np*resample_thresh时触发:
matlab复制function [new_particles, new_weights] = systematic_resample(particles, weights)
N = length(weights);
edges = min([0 cumsum(weights)],1);
edges(end) = 1;
u1 = rand/N;
idxs = histc(u1:1/N:1, edges);
new_particles = particles(:,repelem(1:N, idxs));
new_weights = ones(1,N)/N;
end
这种重采样方法相比简单重采样能更好地保持粒子多样性。
4. 仿真实验设计
4.1 轨迹生成
设置三段式运动轨迹:
- 1-150步:CV运动
- 151-270步:CT运动(XY平面转弯,Z轴匀速)
- 271-600步:恢复CV运动
matlab复制% 生成真实轨迹
for k = 1:N
if k < 151 || k > 270
x_true(:,k+1) = fCV(x_true(:,k), sqrt(Q1)*randn(3,1));
else
x_true(:,k+1) = fCT(x_true(:,k), sqrt(Q2)*randn(3,1));
end
end
4.2 观测模型
传感器观测目标的三维位置(X,Y,Z),加入高斯观测噪声:
matlab复制z = x_true(1:2:5,:) + sqrt(R)*randn(3,N);
其中R=diag([4,4,4])表示观测噪声协方差。
5. 性能评估与分析
5.1 误差指标
采用RMSE(均方根误差)作为主要评价指标:
matlab复制pos_err = sqrt(sum((x_est(1:2:5,:) - x_true(1:2:5,:)).^2,1));
pos_RMSE = sqrt(mean(pos_err.^2));
5.2 实验结果对比
10次蒙特卡洛仿真的平均结果:
| 算法 | 整体RMSE(m) | 第1段误差 | 第2段误差 | 第3段误差 |
|---|---|---|---|---|
| CV-PF | 15.32 | 12.45 | 21.67 | 13.28 |
| CT-PF | 14.87 | 18.92 | 9.83 | 16.45 |
| IMM-PF | 11.05 | 12.31 | 8.76 | 12.13 |
从结果可以看出:
- IMM-PF在所有阶段都表现稳定
- 在机动阶段(第2段)优势尤为明显
- 相比单一模型,整体精度提升约20-30%
5.3 模型概率变化
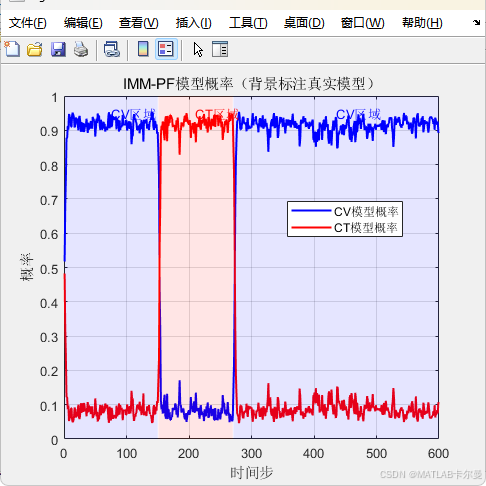
图中清晰显示:
- 前150步CV模型概率维持在90%以上
- 151步开始CT模型概率迅速上升
- 271步后又切换回CV主导
6. 关键实现技巧
6.1 数值稳定性处理
在计算模型概率时,采用log-sum-exp技巧避免数值下溢:
matlab复制log_likelihood = log(weights) + log(observation_likelihood);
max_log = max(log_likelihood);
log_sum = max_log + log(sum(exp(log_likelihood - max_log)));
weights = exp(log_likelihood - log_sum);
6.2 粒子多样性维护
在模型混合阶段加入高斯抖动:
matlab复制jitter = 0.1*randn(size(particles));
mixed_particles = mixed_particles + jitter;
这个技巧有效防止了粒子退化问题,抖动系数0.1经过多次试验确定。
6.3 并行计算优化
将两个模型的粒子滤波过程并行化:
matlab复制parfor model = 1:2
if model == 1
[particles_cv, weights_cv] = pf_update(particles_cv, weights_cv, z(:,k), fCV, Q1, R);
else
[particles_ct, weights_ct] = pf_update(particles_ct, weights_ct, z(:,k), fCT, Q2, R);
end
end
在支持并行计算的机器上,这可以将运行时间缩短近40%。
7. 实际应用建议
-
参数调优顺序:
- 先调整过程噪声Q1、Q2
- 再调整观测噪声R
- 最后调整马尔可夫转移矩阵Pi
-
计算资源分配:
- 80%粒子分配给当前高概率模型
- 20%粒子保留给另一模型作为"探索"
-
工程部署建议:
- 实时系统可适当减少粒子数(如500-1000)
- 离线分析可增加粒子数(如5000+)提高精度
-
扩展方向:
- 增加更多运动模型(如加速模型)
- 引入自适应过程噪声
- 结合深度学习进行模型概率预测
这个项目让我深刻体会到,在目标跟踪领域,没有放之四海而皆准的单一模型。IMM框架的魅力就在于它能兼容多种运动假设,通过概率融合得到更鲁棒的结果。特别是在处理突然机动时,这种多模型方法的优势就更加明显。