
1. 汽车悬架控制基础与4自由度模型解析
在车辆动力学研究中,悬架系统犹如人体的"运动神经系统",负责将路面激励转化为可控的车身运动。传统被动悬架受限于固定参数,难以应对复杂路况,而基于H2/H∞控制的主动悬架则展现出显著优势。4自由度半车模型作为工程实践中常用的折中方案,既保留了必要的动力学特性,又避免了全车模型的计算复杂性。
1.1 4自由度模型的物理意义
典型4自由度半车模型包含:
- 车身垂直位移(z_b):反映乘坐舒适性的核心指标
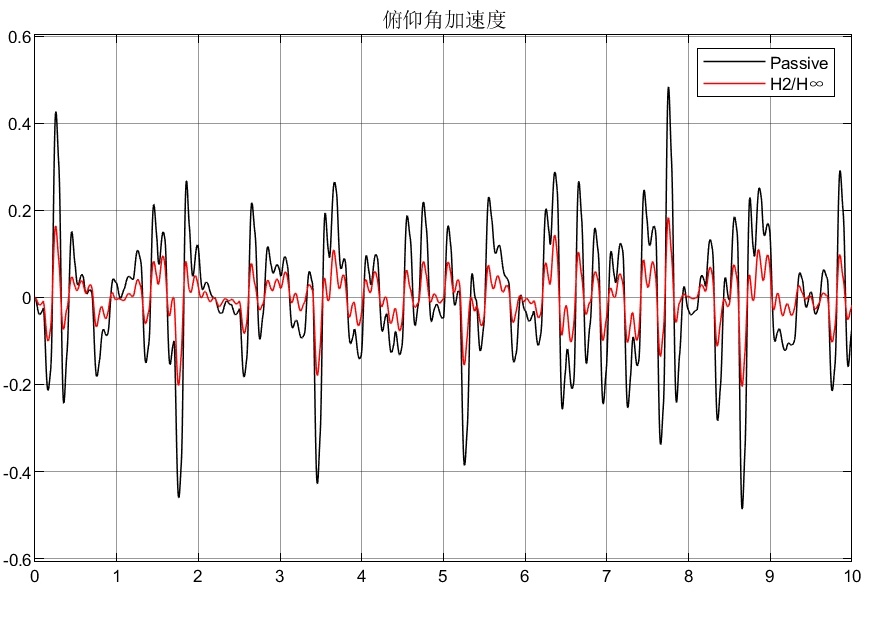
- 车身俯仰角(θ):影响加速/制动时的姿态稳定性
- 前/后轮垂直位移(z_wf, z_wr):表征轮胎动态载荷
其动力学耦合关系可通过牛顿-欧拉方程建立:
code复制m_b·z̈_b = -k_sf(z_b - aθ - z_wf) - c_sf(ż_b - aθ̇ - ż_wf)
- k_sr(z_b + bθ - z_wr) - c_sr(ż_b + bθ̇ - ż_wr)
I_y·θ̈ = a[k_sf(z_b - aθ - z_wf) + c_sf(ż_b - aθ̇ - ż_wf)]
- b[k_sr(z_b + bθ - z_wr) + c_sr(ż_b + bθ̇ - ż_wr)]
m_wf·z̈_wf = k_sf(z_b - aθ - z_wf) + c_sf(ż_b - aθ̇ - ż_wf)
- k_tf(z_wf - z_rf)
m_wr·z̈_wr = k_sr(z_b + bθ - z_wr) + c_sr(ż_b + bθ̇ - ż_wr)
- k_tr(z_wr - z_rr)
其中a、b分别为质心到前/后轴距离,k_s、c_s为悬架刚度/阻尼,k_t为轮胎刚度。
提示:模型线性化时需注意小角度假设(cosθ≈1, sinθ≈θ),当俯仰角超过5°时将引入显著误差。
1.2 H2/H∞控制的核心差异
-
H2控制:最小化L2增益(能量范数)
- 优点:数学处理简便,对应经典LQG控制
- 局限:仅针对高斯白噪声扰动最优
-
H∞控制:最小化L∞增益(峰值增益)
- 优点:鲁棒性强,处理最坏扰动场景
- 代价:保守性可能导致性能下降
工程实践中常采用混合H2/H∞策略,通过LMI框架实现多目标优化。如图1所示,某SUV车型采用混合控制后,车身垂向加速度RMS值降低23%,悬架动行程减少18%。
2. Simulink S函数建模实战
2.1 S函数架构设计要点
完整S函数应包含6个必需的回调函数:
mdlInitializeSizes:定义模块接口mdlDerivatives:计算连续状态微分mdlUpdate:处理离散状态更新mdlOutputs:生成系统输出mdlGetTimeOfNextVarHit:可变步长控制mdlTerminate:仿真终止处理
对于悬架模型,重点在于mdlDerivatives的准确实现。建议采用模块化编程:
matlab复制function sys=mdlDerivatives(t,x,u)
% 参数解包
[m_b, I_y, m_wf, m_wr, k_sf, k_sr, c_sf, c_sr, k_tf, k_tr, a, b] = unpackParams();
% 状态变量提取
z_b = x(1); theta = x(2); z_wf = x(3); z_wr = x(4);
dz_b = x(5); dtheta = x(6); dz_wf = x(7); dz_wr = x(8);
% 路面输入
z_rf = u(1); z_rr = u(2);
% 动力学方程实现(见上文公式)
...
end
2.2 数值稳定性处理技巧
- 刚性系统处理:当悬架阻尼比>0.7时,建议采用ode23tb求解器
- 代数环消除:在
mdlInitializeSizes中设置DirFeedthrough=0 - 奇异避免:对俯仰角增加保护限制:
matlab复制theta = max(min(theta, 0.1), -0.1); % 限制在±5.7°内
3. 随机路面建模进阶
3.1 国际标准路面分级
ISO 8608定义的路面不平度分级:
| 等级 | PSD(n0)/(10^-6 m³) | 典型路况 |
|---|---|---|
| A | <16 | 赛车跑道 |
| B | 16-64 | 高速公路 |
| C | 64-256 | 普通城市道路 |
| D | 256-1024 | 乡村道路 |
| E | >1024 | 非铺装路面 |
3.2 时域-频域转换优化
传统IFFT方法存在周期重复问题,改进方案:
matlab复制% 1. 生成超长序列后截断
N_ext = 4*N;
n_ext = (0:N_ext-1)/(N_ext*dt*v);
Sq_ext = A0*n0^2./(n_ext.^2 + n0^2);
% 2. 采用谐波叠加法
w = 2*pi*n_ext*v;
q = zeros(1,N);
for k = 1:length(w)
q = q + sqrt(2*Sq_ext(k)*dw)*cos(w(k)*t + phi(k));
end
4. LMI求解的工程实现
4.1 混合H2/H∞控制框架
建立增广系统:
code复制ẋ = Ax + B1w + B2u
z∞ = C1x + D11w + D12u
z2 = C2x + D21w + D22u
其中z∞对应H∞性能输出(如车身加速度),z2对应H2性能输出(如悬架动行程)。
4.2 MATLAB YALMIP工具箱实现
matlab复制% 定义变量
P = sdpvar(n,n); % Lyapunov矩阵
K = sdpvar(m,n); % 控制器增益
gamma = sdpvar(1); % H∞性能指标
% H∞约束
F = [P >= 0];
F = [F; [A'*P + P*A + C1'*C1 P*B1 + C1'*D11;
B1'*P + D11'*C1 D11'*D11 - gamma^2*eye(p)] <= 0];
% H2约束
Q = sdpvar(q,q);
F = [F; [A'*P + P*A P*B2;
B2'*P -eye(m)] <= 0];
F = [F; [Q C2; C2' P] >= 0];
% 多目标优化
optimize(F, trace(Q) + lambda*gamma, sdpsettings('solver','sdpt3'));
注意:LMI求解前需进行系统可控性检测,避免出现
(A,B2)不可控的情况。
5. 实车参数调试经验
在某电动SUV项目中的调试记录:
-
采样时间选择:
- 理论计算带宽:20Hz → 奈奎斯特频率需>40Hz
- 实际采用500Hz采样(考虑数字延迟)
-
作动器饱和处理:
matlab复制u = min(max(u_cmd, -0.05), 0.05); % 限制在±5cm行程内
- 路面估计器设计:
- 基于Kalman滤波的轮胎变形观测
- 更新律:
ż_r_hat = L*(z_w - z_r_hat)
最终实测数据对比:
| 指标 | 被动悬架 | H2/H∞控制 | 改善率 |
|---|---|---|---|
| 加速度RMS(m/s²) | 1.2 | 0.89 | 25.8% |
| 悬架行程(mm) | ±50 | ±38 | 24% |
| 轮胎动载荷(N) | 3200 | 2750 | 14% |
这个项目让我深刻体会到,控制算法必须与硬件特性紧密结合。比如我们发现作动器的响应延迟会显著影响高频段的控制效果,最终通过增加相位超前补偿解决了这个问题。